请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316A 您好 TI 团队
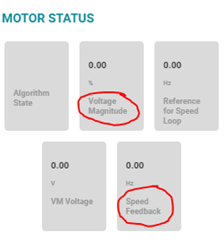
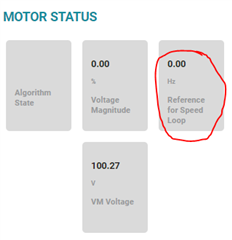
我正在使用 MCF8316AEVM。 电路板和电机使用模拟电位器进行了配置和测试。 然后、将输入配置为接受10Hz 至325Hz 的 PWM (占空比)。
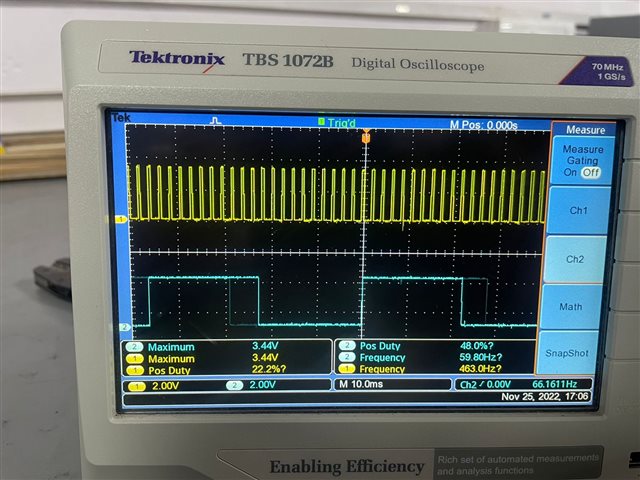
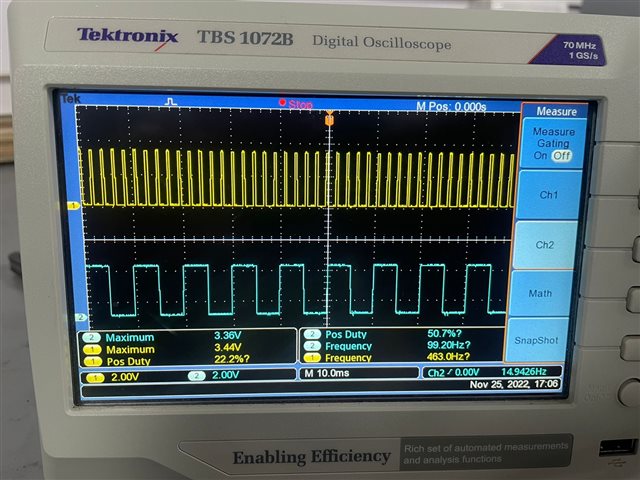
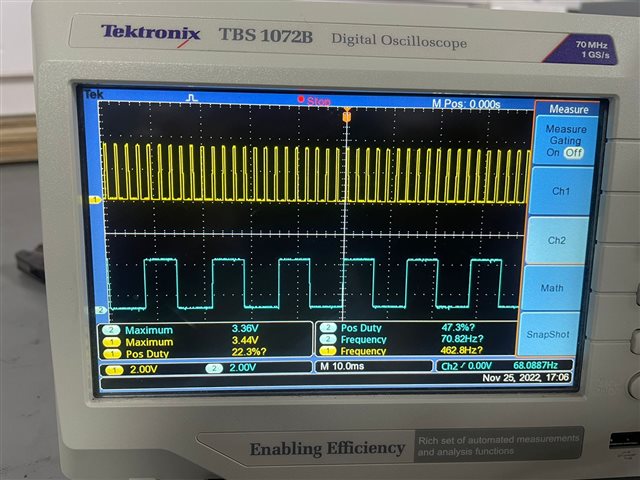
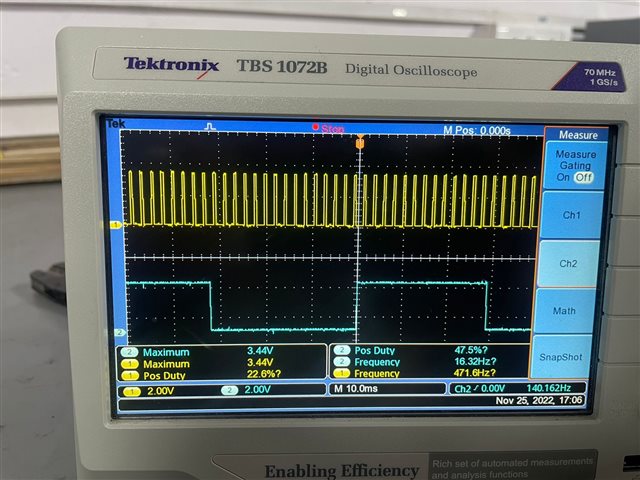
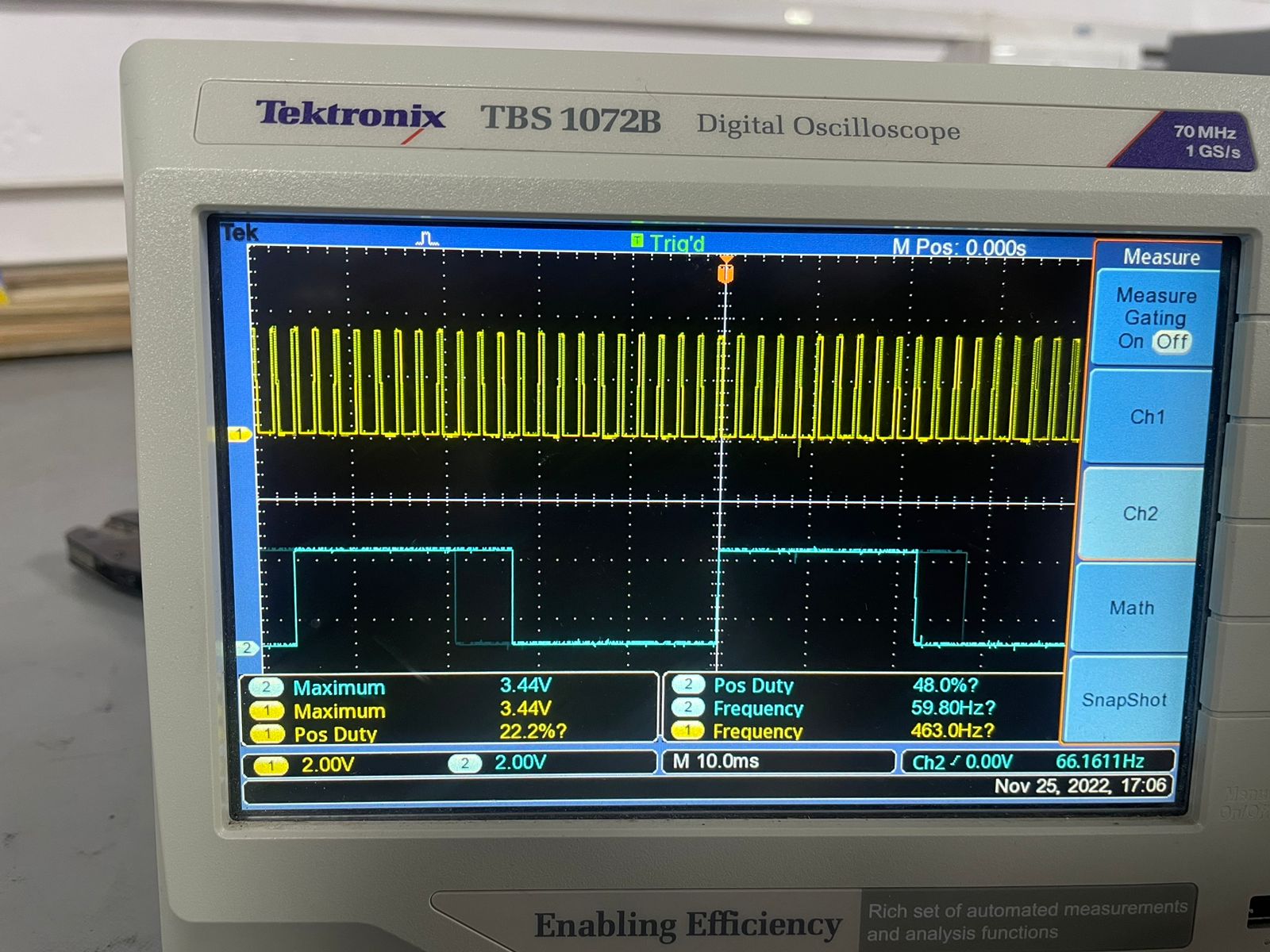
我提供了 RaspberyPi 的 PWM、50Hz 时为3.3V。 每当在任何特定的占空比下提供输入 PWM 时、电机都会开始以一些急动开始旋转、然后速度开始变化、稍后停止。
片刻之后、它会重新启动相同的行为。 EVM 无法以请求的速度旋转电机。
您能否提出电机行为为何如此的建议?
谢谢你
k Bindu