请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8412 主题中讨论的其他器件: DRV8432、 DRV8962、 SN74HC125
尊敬的 TI 团队:
我将使用 DRV8412 (可能是 DRV8432)以双向方式驱动有刷24V 直流电机。 我对下面列出的主题感到困惑、非常感谢您的支持。
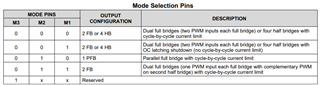
1) 1)我将双向驱动两个直流电机。 因此、该器件的自然操作模式为双全桥模式(M3=0、M2=1、M1=1)。 根据数据表、在此模式下、半桥 A 的控制信号(PWM_A)的补码馈送到其他半桥 B。在这种情况下、是否可以双向运行? 如何应用制动器? 我认为此模式仅适用于全速(100%占空比)操作创建。 我是对的吗?
2) 2)我仔细查看了第一个典型应用(第8.2.1节)。 在设计参数(表3.)中、运行模式被称为 并联全桥。 我认为这种典型应用并非如此。 是否有任何拼写错误? 此外、在典型应用的原理图中、所有模式选择输入(Mx)都设置为0。
3) 3)我是否应该使用第一个运行模式(M2=0、M1=0)而不是第四个运行模式(M1=1、M2=1)? 因为我认为在这种情况下、H 桥完全控制(每个 H 桥有两个控制信号)。 不过、我想知道我是否可以使用后一种工作模式。
此致、
Burak Keskin