请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316AEVM 主题中讨论的其他器件: MCF8316A、 MSP-EXP430FR2355
您好!
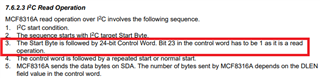
我是用于电机驱动器控制的 MCF8316AEVM 开发板。 我对 i2c 寄存器和 i2c 的读写方法有疑问。 正如我所知、如果 EVM 支持 I2C 的标准协议、因此对此没有太多问题、但我仍在寻找寄存器映射文档、该文档将帮助我了解电机驱动器如何通过 I2C 运行。
我计划在 PCB 的最后一层使用外部 MCU、因此它将 通过 I2C 与 MCF8316AEVM 进行通信、这意味 着 MCF8316AEVM 将被预加载一次、稍后我将使用 i2c 通过外部主机 MCU 进行控制。
问题。
如何 通过 I2C 读取和写入 MCF8316AEVM。
请提供一些与 I2C 寄存器映射或数据表相关的信息。