请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316AEVM 主题中讨论的其他器件: MCT8316A、 MCF8316A、 MCT8316Z
尊敬的社区:
- 在 MCF8316AEVM 的调优过程中、我发现当 PI 控制器调整不好时、负载电机以 固定的振动频率(约30Hz)振动、主 VM 导线上出现以下可见电流峰值:
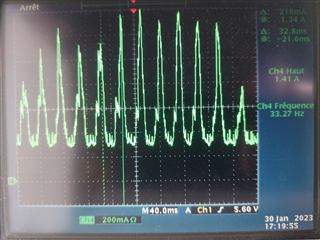
如果 PI 设置不是那么令人发指、这种振动行为就会消失。
该频率的来源是什么? 它是 PI 控制器的治疗周期吗? 即使我更改了任何设置、降低了频率或速度、该值也是固定的。
如果它来自一个设置寄存器、那么增加这个频率会很有趣、这样 PI 控制器的反应更快、并且更好地适应速度和扭矩。
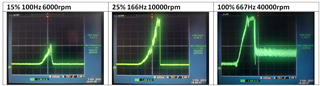
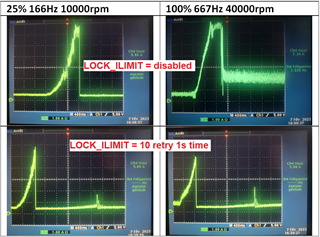
- 此外、有时当我启动或停止电机时、它会在主(VM 线)电流上呈现粗糙的8A 过冲:
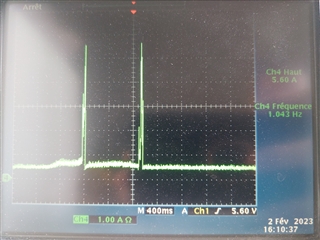 <=此处是一个开始、然后是停止、电机在两个过冲之间旋转
<=此处是一个开始、然后是停止、电机在两个过冲之间旋转
如何防止这些峰值?
我感觉这些峰值是在我们从 开环切换到闭环以及从闭环切换到制动程序时生成的。
手动设置 PI 控制器值时、峰值行为看起来高于 Ki Kp 值为0并自动调整时的行为、则峰值不常出现并受 ILIMIT 电流值的限制。 我们可以从何处读取自动调优的 KI KP 值?
提前感谢您。 我的电机参数为:24V 直流、最大40.000rpm、1.35R、0.09mH、17mV/Hz (来自 MPET)、 8.2A 堵转电流。
此致、
Julien