请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8876-Q1 主题中讨论的其他器件:DRV8876
尊敬的 TI 支持团队。
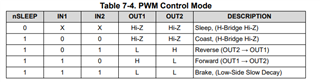
我想在将 PWM 从微控制器输入到驱动器 IC 的同时、在"PWM 控制模式"下切换旋转方向。
在这种情况下、我是否需要分别将 IN1和 IN2连接到微控制器的 PWM 端口?
・在正向方向上、IN2开关0/1→IN2为 PWM
・反向、IN1开关0/1→IN1为 PWM
即使您是高阻态(滑行)非负荷型、
・在正向方向上、IN1开关0/1→IN1为 PWM
・反向时、IN2开关0/1→IN2为 PWM
我们知道这一点、但如果出现错误、我们希望得到建议。
附加 Excel 文件
e2e.ti.com/.../DRV8876_2D00_Q1-Japanese-to-English.xlsx
此致、
Hiroaki Yuyama