主题中讨论的其他器件: DRV8323
在过去的五年中、我的电动自行车系统完美运行、配备无传感器的 Instaspin、FOC、C2000器件+ DRV8301。 突然之间、系统通过将故障隔离到 DRV8301来产生故障。 经过检查、好像一小层焊料或类似材料可能落在两个引脚上并将它们短接在一起、从而导致故障。 DRV8301就地被替换、系统迅速恢复运行。 几天后、测试再次失败。
很显然、第一个故障不是由焊料叠层引起的。
故障已与高侧栅极驱动器隔离、并且与这些论坛上的故障相比相对较小。 首次 SH_C 和 GH_C 在内部短路@约4欧姆的内部电阻时结束。 第二次 SH_B 和 BST_B 最终以大约20欧姆的电阻短接在一起。 有趣的是、 这些条件都不足以影响电荷泵、以至于系统停止工作并出现故障标志。 相关的高侧停止、但系统仍能在电机旋转时达到最佳效果。 它可以正常工作、但在功率输出明显较低且谐波含量激增(远离正弦驱动)的情况下、声学噪声会增加。
在可靠运行的五年后、我认为布局、组件选择或系统调整不是问题所在。 随着时间的推移、更大的元件值/性能漂移/元件故障 可能是 最可能的问题。 遗憾的是、我不再拥有 PCB 布局、但考虑到它的可靠性、到目前为止、我认为这不是问题所在。 栅极驱动器根据其最低峰值电流传输进行配置、并使用10欧姆栅极电阻器。 MOSFET 的总栅极电荷为89nC、系统设置为以30kHz 运行(完全在 DRV8301s 能力范围内)。 在电源上安装了一个 TVS 以及1000uF 的大容量、低 ESR 电容。 该电源是一个高电流锂离子电池组、因此 反电动势灌入 应该不是问题。 TVS 尚未专门定位以保护 DRV8301、并且电池与寄生效应距离较远、因此这不是完全排除的。
系统标称值为48V、系统驱动高达18A 的限值、如 Instaspin 软件中所设置。
我显然意识到这只是干草堆中的一个问题、但考虑到高侧栅极驱动器出现故障的方式、这种故障在使用多年之后是否表明了我在解决这个问题方面可以重点关注的任何东西?
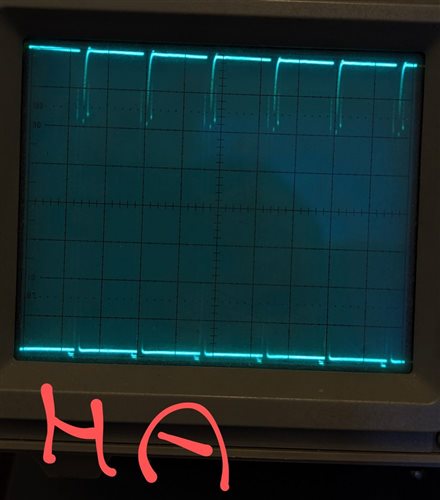
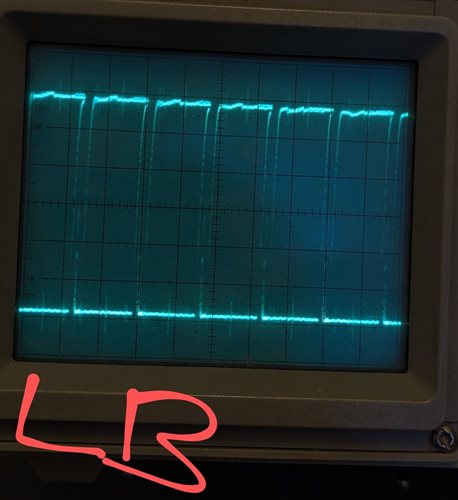
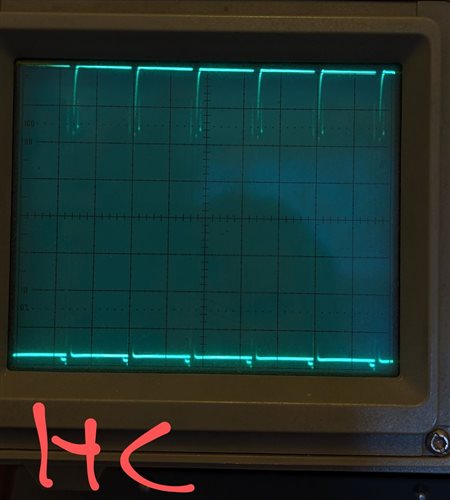
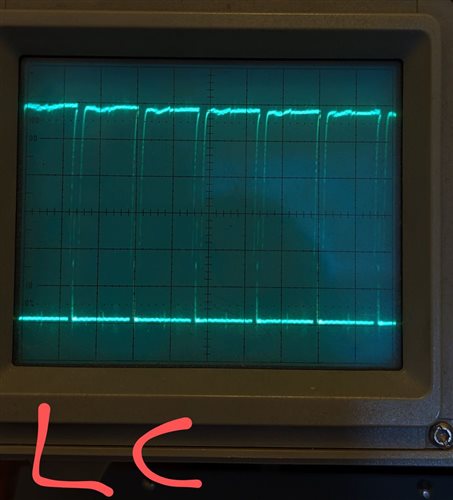
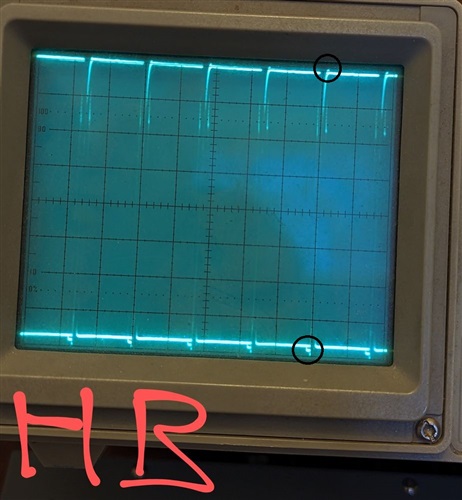
显然系统内的某些事情发生了变化、但我宁愿隔离并诊断此问题、而不是更换所有电源组件并希望这样可以修复此问题。 确定栅极驱动信号的范围是 我要 做的第一件事、但我想我要在讲英语之前先问一下这个问题、因为这始终有可能导致进一步的损坏。
非常感谢、
马特.