请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8323 主题中讨论的其他器件:DRV832X、
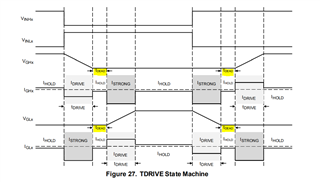
我想知道的是下图。
您告诉过:
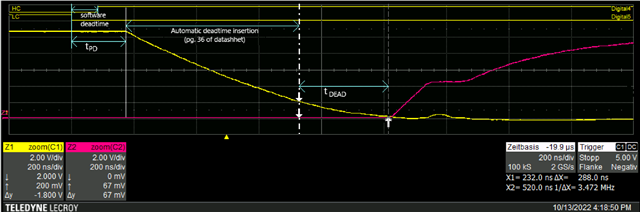
在您的情况下、INH 在 INL 之后延迟1000ns、因此不存在跨导、并且驱动器知道这一点、因此在这种情况下无需添加任何死区时间。 这就是我说过您不需要在输入之间添加软件死区时间的原因。
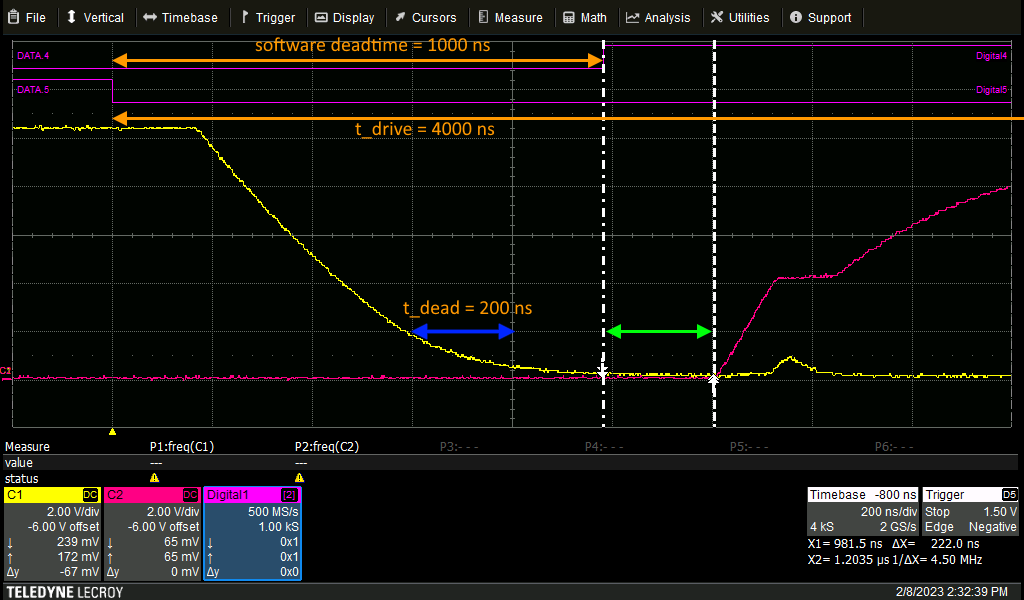
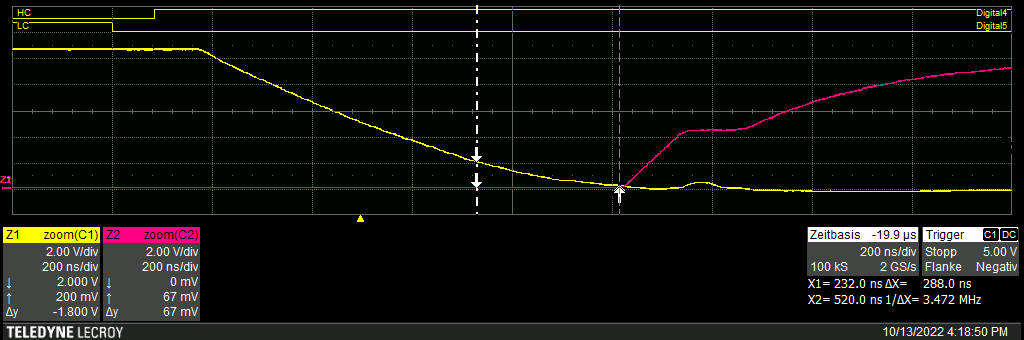
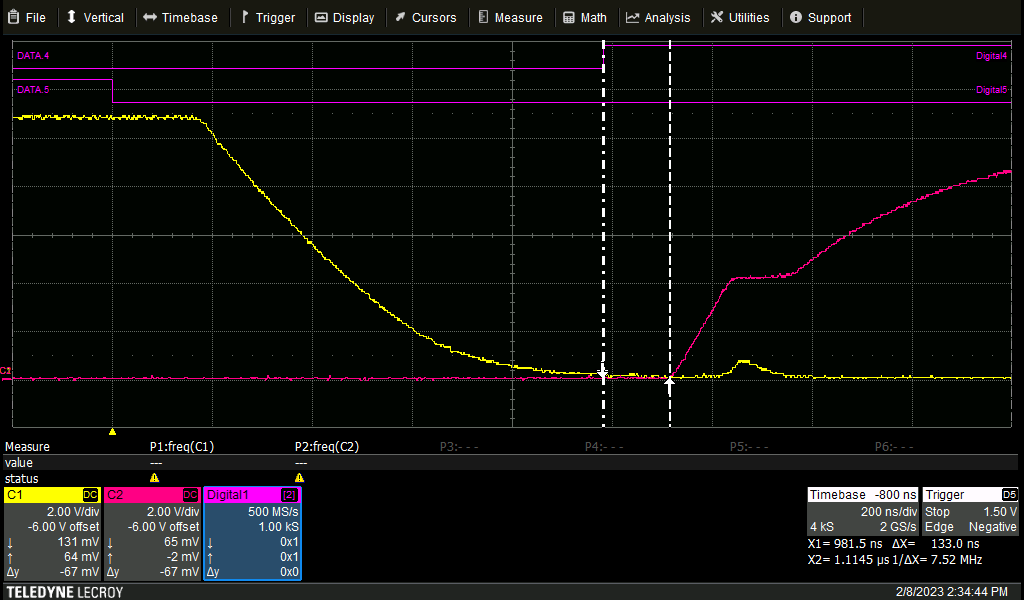
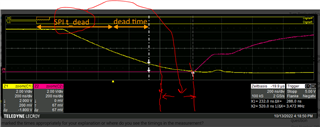
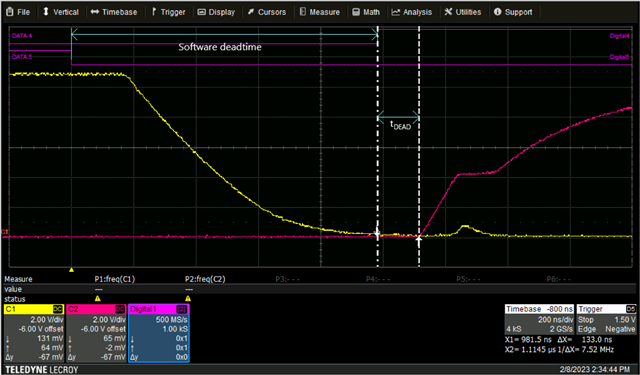
这就是我希望在 INHx (Digital4)更改之后几乎立即出现上升的高侧栅极-源极信号(红色)的原因、因为 t_dead 应该已经结束。 但在测量中、t_dead 似乎添加到了 INxx 输入信号的上升沿。
您能更详细地解释一下吗?
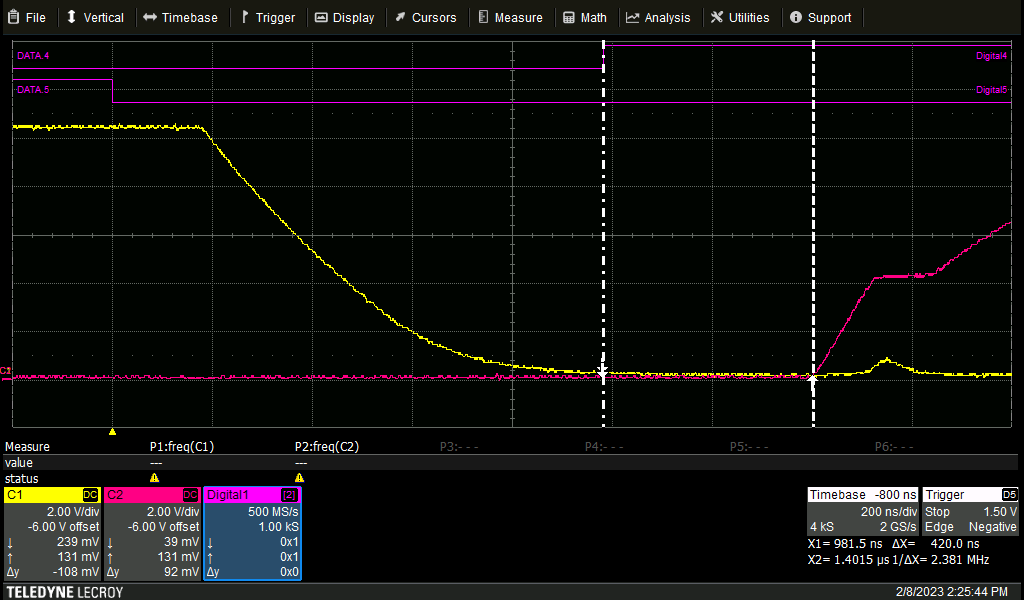
红色:栅极-源极高侧
黄色:栅极-源极低侧
软件死区时间:1000ns
T_DEAD:400ns
T_drive 4000 ns
此致
托比亚斯