请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
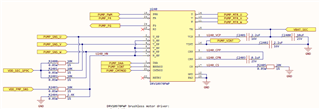
器件型号:DRV10970 您能否定义在方向变化期间何时应用 tLOCK_EN (0.7秒)? 我已经阅读过很多关于方向变更延迟的 e2e 帖子、但对于何时添加此延迟没有看到清楚的解释。
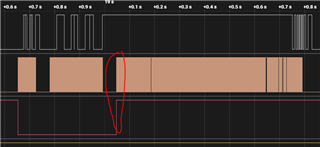
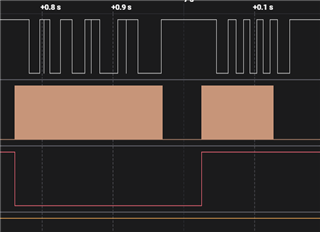
当我改变方向时、我将 PWM 设置为零、等待数十毫秒、更改 FR、等待几毫秒、然后再次将 PWM 设置为开启。 有时电机会立即反向、但有时会等待0.7秒后再重新运行。 我无法判断哪些情况导致了额外延迟。
几个 e2e 答案解释了 DRV 在改变换向方向前等待电机停止。 是否有一个短于应用于确定"已停止"的 tLOCK_EN 的超时?