请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
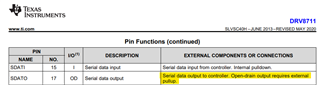
器件型号:DRV8711 主题中讨论的其他器件: TM4C1294NCPDT
先生,
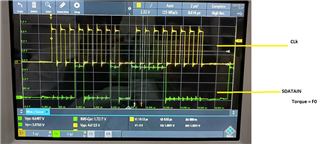
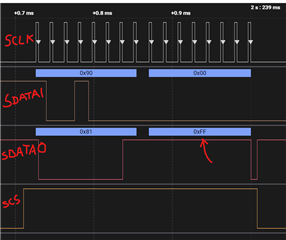
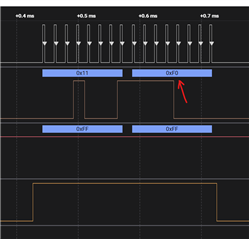
很抱歉,我的回复太迟了。 该查询涉及 DRV8711:DRV8711步进驱动器寄存器读取问题的连续性。
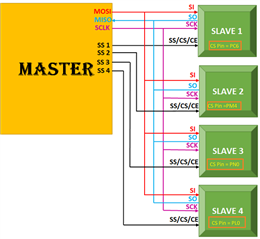
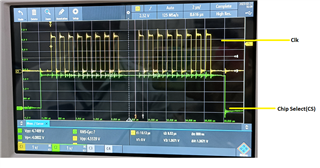
您问的最后一个问题是, 每个设备都有自己的专用片选(CS)信号。 是否使用正确的 CS 信号读取所需的驱动器?
是的、每个器件都有自己的专用 CS 信号。 但读取将仅在第5次尝试时完成。 请尽快解决此问题。