您好!
我们在用于驱动 BLDC 电机的三相逆变器中使用 DRV8353 (确切地说是 DRV8353RHRGZR)来驱动 MOSFET 的栅极。 我们将驱动器设置为"同步1xPWM 模式"、这是用于控制三相 BLDC 电机的推荐工作模式。 然而、我们认为此工作模式的换向表(数据表中的表3)不正确。 我们认为、根据转子位置(霍尔传感器输入)生成的磁场矢量未放置在相对于转子位置的正确角度。 我们预计转子磁场矢量和创建的定子磁场矢量之间的角度应在120度至60度之间变化(六步操作)。 这样、我们可以将两个磁场矢量之间的角度保持在90度左右(扭矩与这两个矢量之间的角度正弦成正比)、从而更大限度地提高每安培扭矩输出(MTPA)。 但是、对于数据表中提供的换向表(表3)、对于一个方向(INHC=0)、该角度在60度至0度之间变化、对于另一个方向(INHC=1)、它在120度至60度之间变化。 这反过来会为两个旋转方向产生空载速度差。 在一个方向上、电机转速超过其在给定总线电压下的额定无负载速度、而在另一个方向上、电机转速无法达到其无负载速度。 我们认为、这是由于上述两个磁场矢量之间的角度差异。 在一个方向上、它减弱转子上永磁体的磁场、这反过来增加了无负载速度(磁场减弱操作)。 另一方面、相比之下、它可增强转子的磁场、从而降低电机的空载速度、因为在相同速度下产生的反电动势电压会更高。 我们在设置中观察到了该情况。 当我们在"同步1xPWM 模式"中使用栅极驱动器时、在实施闭环电流控制器的情况下、电机在给定电压下的加速超过其数据表中指定的空载速度、在另一个方向上、电机无法达到其空载速度。 此外、电机在两个旋转方向上都处于嗡嗡声和静止振动状态。
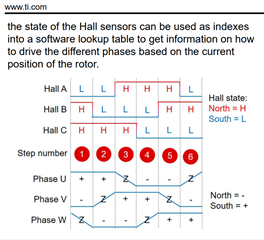
在作出这些观察和推断之后、我们还尝试了我们认为正确换向方式的其他切换方案。 我分享了我们在下面实施的换向表。

根据此换向表、您让电流流过电机相位、以便对于每个霍尔传感器组合和两个操作方向、转子磁场和定子磁场之间的角度在120度至60度之间变化。 当我们根据此换向表向电机施加电压时、电机在两个旋转方向上均达到数据表中指定的空载速度。 此外,我们不再观察到发动机的剧烈嗡嗡声和振动。 它开始平稳、安静地运行。 此外、当我们在互联网上搜索时、最常用的换向表是我在上图中分享的表。 因此、我们认为、 对于 BLDC 应用、您的数据表中共享的"同步1xPWM 模式"的换向表(表3)可能不正确或不正确。