请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8343-Q1 主题中讨论的其他器件: DRV8323
大家好、
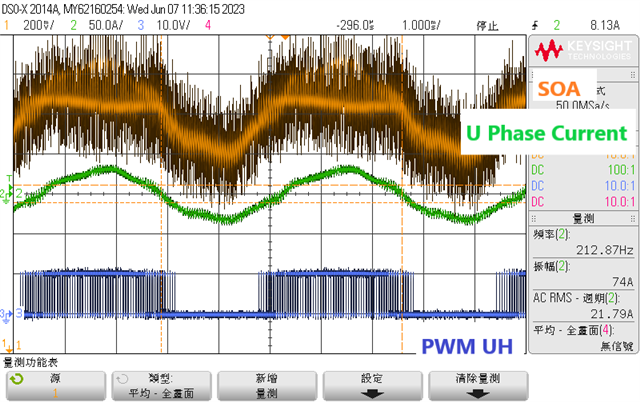
当电机负载时、DRV8343S 生成的电流反馈信号 SOA、SOB、SOC 具有异常的尖峰。 为什么会发生这种情况?
驱动器板电路如下所示:
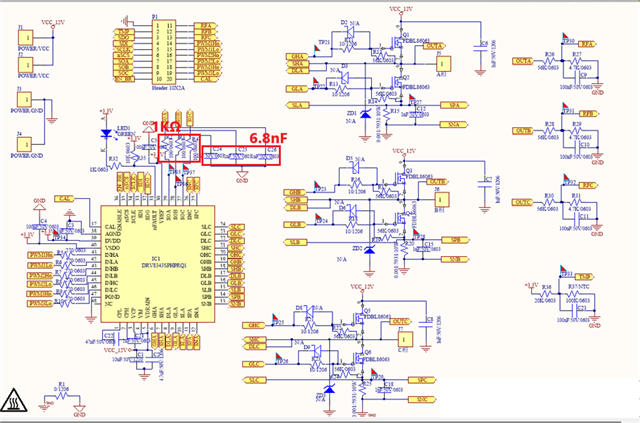
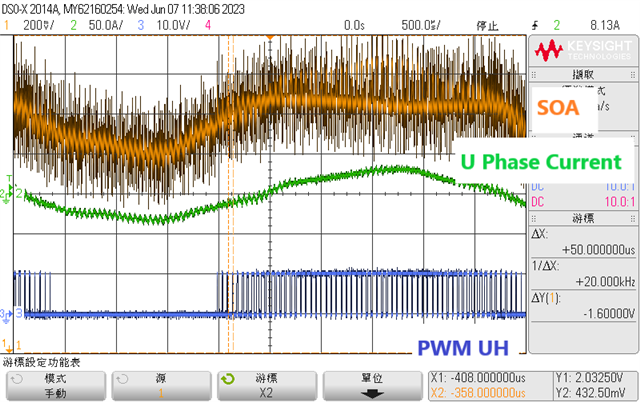
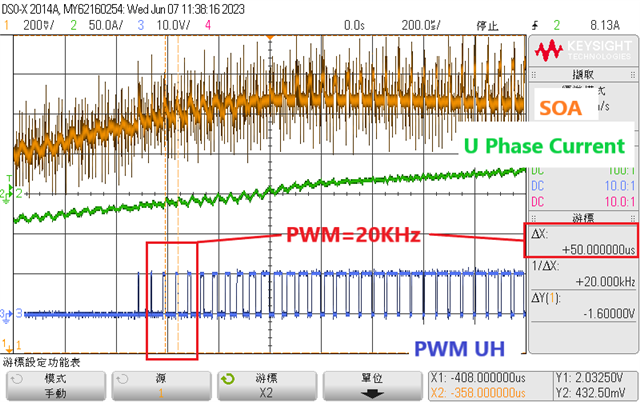
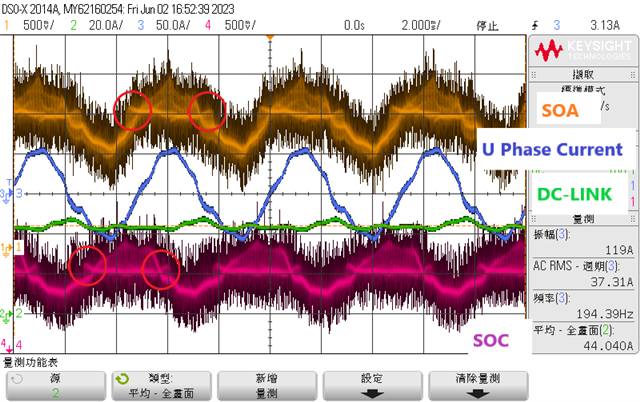
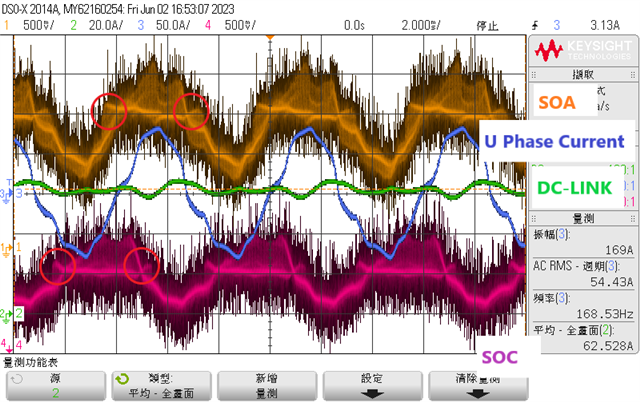
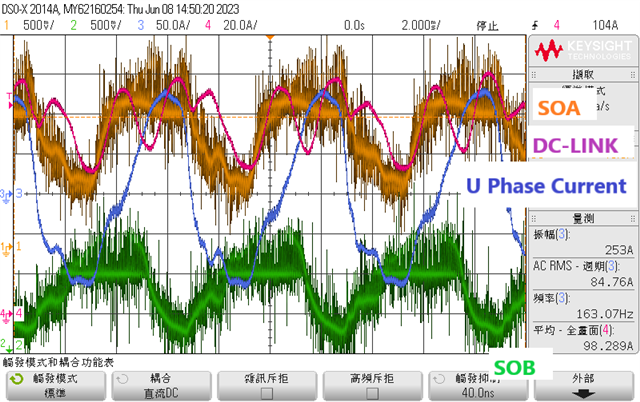
测试波形如下:
您能帮助检查这个问题吗? 谢谢。
此致、
切里

This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
大家好、
当电机负载时、DRV8343S 生成的电流反馈信号 SOA、SOB、SOC 具有异常的尖峰。 为什么会发生这种情况?
驱动器板电路如下所示:
测试波形如下:
您能帮助检查这个问题吗? 谢谢。
此致、
切里
您好、Cherry:
至于 SOA 的尖峰、可能会发生一些电感尖峰、因为尖峰的时序与 UH PWM 信号从完全低到高(含占空比)的开始/结束相关。 但是 、我建议尤其在低侧 FET 导通时对 SOx 采样、因为此时电流将流经电流感应分流电阻器。 这可能会产生更预期的波形、但如果您仍然看到尖峰、我们可以考虑其他原因、例如我之前提到的电感。
对于直流链路电流、预计纹波是由于换向期间来自电机的电流进入电池造成的。 只要电源电压 不超过器件的绝对最大额定值、这是可以的。 但是、如果您看到这些纹波导致器件电源电压超过限值、则此应用需要额定值较高的驱动器。 如果您的问题得到了解答、请告诉我。
此致!
戴维斯
嗨、Davis:
SOA 上的尖峰实际上对应于 UL PWM、该尖峰在 UL PWM 为高电平时是峰值、而 PWM 为高电平时则越长、尖峰时间就越长。 如果该峰值是预期的实际波形、是否意味着上图中导致的驱动异常不是此峰值问题的影响、并且 SOA、SOB、SOC 的总体波形失真是由非烟波状态引起的?
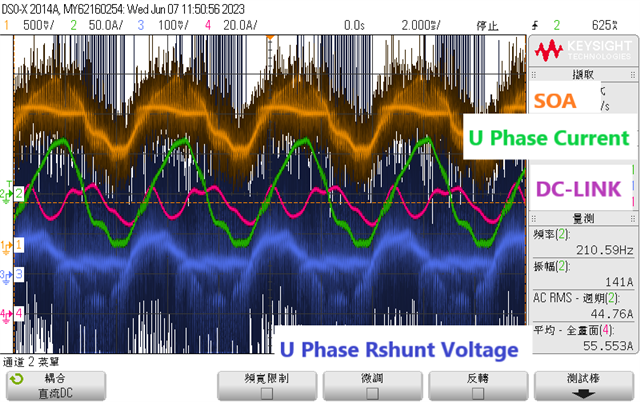
如何在加载后改善 SOA、B 和 C 波形异常? 当前对目标低通滤波器的整流方法是具有1KΩ Ω 的固定电阻和1nF~15nF 的可调电容。 最终测试使当前的6.8nF (低通23.4KHz)成为最佳匹配、但仍然无法满足目标。
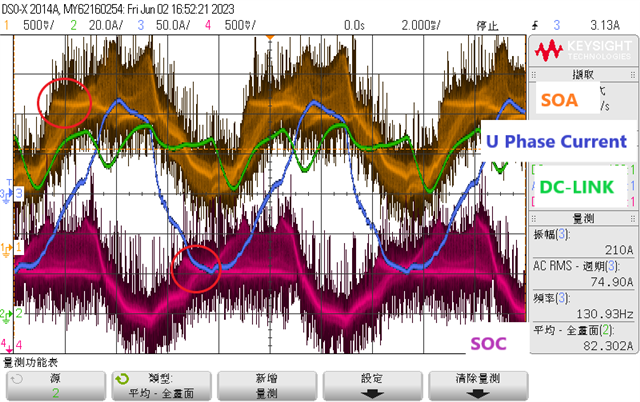
下图显示了电流最大负载下的波形、当直流电流接近100A 时、纹波非常剧烈、SOA、SOB 和 SOC 波形严重失真、相电流也异常:
谢谢。此致、
切里
您好、Cherry:
请参阅 DRV8343-Q1数据表中8.3.4.1节的公式3。 该公式显示了预期的输出 SOx。 如果输出 SOx 与此公式不匹配、则系统可能存在问题、否则如果结果匹配、则在给定该系统参数的情况下、应预期这些输出。
在滤波方面、请参阅本应用手册、具体而言是电流检测滤波布局的最佳实践: https://www.ti.com/lit/an/slva959b/slva959b.pdf?ts=1683836782300。如果对 SOx 的滤波有更多疑问、我认为本文档包含更深入的电流检测放大和滤波解释: https://www.ti.com/lit/eb/slyy154a/slyy154a.pdf?ts=1686695679621&ref_url=https%253A%252F%252Fwww.google.com%252F。
波形本身的性质取决于换向算法。 非正弦换向 会产生扭矩纹波。 如果这些纹波导致了问题、我认为与电机驱动器本身相比、这更是换向算法的问题。
如果这些信息有所帮助、敬请告知。
此致!
戴维斯
尊敬的 David:
上述文件对布局设计很有用、但布局需要一些时间进行验证。 此时可以对该计划进行哪些调整?
该程序当前仅根据示例代码使用"universal_motorcontrol_lab_f28002x"的示例代码将 DRV8323的 SPI 协议更改为 DRV8343。 并将用户参数配置为"user_mtr1.h"。 换向算法设置如下图所示:
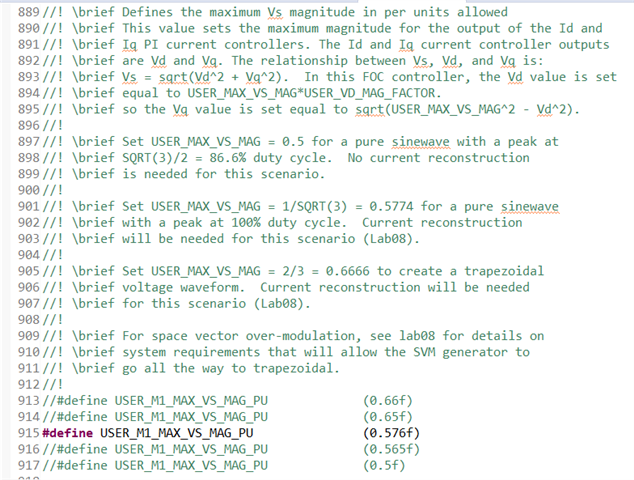
//############################################################################# // $Copyright: // Copyright (C) 2017-2023 Texas Instruments Incorporated - http://www.ti.com/ // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //############################################################################# //! \file /solutions/universal_motorcontrol_lab/common/include/user_mtr1.h //! \brief Contains the user related definitions //! This file is used for each device includes F28002x, F28003x, F280013x, //! F280015x, and the other newer C2000 MCUs. //! #ifndef USER_MTR1_H #define USER_MTR1_H //***************************************************************************** // // If building with a C++ compiler, make all of the definitions in this header // have a C binding. // //***************************************************************************** #ifdef __cplusplus extern "C" { #endif //***************************************************************************** // //! \defgroup USER USER_MTR1 //! @{ // //***************************************************************************** // // the includes // platforms #include "hal.h" // modules #include "userParams.h" #include "user_common.h" // ***************************************************************************** // the defines //------------------------------------------------------------------------------ #if defined(HVMTRPFC_REV1P1) // Bypass the 820k resistor for low voltage motor on this kit //#define LV_JUMPER_EN // Bypass the 820k resistor #ifndef LV_JUMPER_EN //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (220.0f) //! \brief Defines the maximum voltage at the AD converter // Full scale voltage of AD converter, not the current voltage #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (409.90f) //! \brief Defines the analog voltage filter pole location, Hz //! #define USER_M1_VOLTAGE_FILTER_POLE_Hz (375.55f) #else // Populate jumpers on J1/J2/J3/J4 for short R20/R23/R26/R37 for low voltage motor //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (24.0f) //! \brief Defines the maximum voltage at the AD converter // Full scale voltage of AD converter, not the current voltage #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (112.21f) //! \brief Defines the analog voltage filter pole location, Hz //! #define USER_M1_VOLTAGE_FILTER_POLE_Hz (381.15f) #endif // High Voltage motor control kit #if defined(MOTOR1_DCLINKSS) || defined(MOTOR1_ISBLDC) //! \brief Defines the maximum current at the AD converter #define USER_M1_ADC_FULL_SCALE_CURRENT_A (19.995f) //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (-1.0f) //! \brief ADC current offsets for dc-link #define USER_M1_IDC_OFFSET_A (9.997f) //! \brief ADC current offsets for dc-link #define USER_M1_IDC_OFFSET_AD (2048.0f) #define USER_M1_IDC_OFFSET_AD_MAX (USER_M1_IDC_OFFSET_AD + 100.0f) #define USER_M1_IDC_OFFSET_AD_MIN (USER_M1_IDC_OFFSET_AD - 100.0f) #else // !(MOTOR1_ISBLDC || MOTOR1_DCLINKSS) //! \brief Defines the maximum current at the AD converter #define USER_M1_ADC_FULL_SCALE_CURRENT_A (19.995f) //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (1.0f) #endif // !(MOTOR1_ISBLDC || MOTOR1_DCLINKSS) //! \brief ADC current offsets for A, B, and C phases #define USER_M1_IA_OFFSET_AD (2049.367f) #define USER_M1_IB_OFFSET_AD (2042.771f) #define USER_M1_IC_OFFSET_AD (2054.451f) //! \brief ADC current offset for CMPSS #define USER_M1_IS_OFFSET_CMPSS (uint16_t)((USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD) / 3.0f) //! \brief ADC voltage offsets for A, B, and C phases #define USER_M1_VA_OFFSET_SF (0.503290117f) #define USER_M1_VB_OFFSET_SF (0.500881076f) #define USER_M1_VC_OFFSET_SF (0.497107089f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (380.0f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (350.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (12.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (15.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.2f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (250.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (500.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of HVMTRPFC_REV1P1 //------------------------------------------------------------------------------ #elif defined(DRV8329AEVM_REVA) // LaunchPad-F280025 //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (48.0f) //! \brief Defines the maximum voltage at the AD converter #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (76.04549098f) // 110k/4.99k //! \brief Defines the analog voltage filter pole location, Hz #define USER_M1_VOLTAGE_FILTER_POLE_Hz (326.6255675f) // 110k/4.99k/100nF //! \brief Defines the maximum current at the AD converter //! Set the gain of the CSA, the value should be set accordingly. //! CSAGAIN=5V/V(J2=GND), CSAGAIN=10V/V(J2=50K), CSAGAIN=20V/V(J2=200K), CSAGAIN=40V/V(J2=DNP) //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (82.5f) // Rs=0.001/gain=40/J2=DNP //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (66.0f) // Rs=0.0025/gain=20/J2=200K #define USER_M1_ADC_FULL_SCALE_CURRENT_A (33.0f) // Rs=0.0025/gain=40/J2=DNP // Single shunt #if defined(MOTOR1_DCLINKSS) || defined(MOTOR1_ISBLDC) //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin (+) of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin (-) of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (1.0f) //! \brief ADC current offsets for dc-link // the dc-link offset current for DRV8329AEVM_REVA #define USER_M1_IDC_OFFSET_A (USER_M1_ADC_FULL_SCALE_CURRENT_A / 2.0f) //! \brief ADC current offsets for dc-link #define USER_M1_IDC_OFFSET_AD (516.717f) //~=4096.0/8.0 //! \brief ADC current offset for CMPSS #define USER_M1_IDC_OFFSET_CMPSS (uint16_t)(USER_M1_IDC_OFFSET_AD) #define USER_M1_IDC_OFFSET_AD_MAX (USER_M1_IDC_OFFSET_AD + 100.0f) #define USER_M1_IDC_OFFSET_AD_MIN (USER_M1_IDC_OFFSET_AD - 100.0f) #else //!MOTOR1_DCLINKSS | !MOTOR1_ISBLDC #error This inverter board only supports single shunt! #endif // !MOTOR1_DCLINKSS | !MOTOR1_ISBLDC //! \brief ADC voltage offsets for A, B, and C phases #define USER_M1_VA_OFFSET_SF (0.507042527f) #define USER_M1_VB_OFFSET_SF (0.505379438f) #define USER_M1_VC_OFFSET_SF (0.50771445f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (54.5f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (52.5f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (8.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (10.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.01f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (90.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (1800.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of DRV8329AEVM_REVA //------------------------------------------------------------------------------ #elif defined(BSXL8323RS_REVA) //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (12.0f) //! \brief Defines the maximum voltage at the AD converter //#define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (60.87f) // 4.7/(4.7+82) #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (42.62f) // 4.7/(4.7+56) //#define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (64.87f) // 4.99/(4.99+93.1), DRV8343S-EVM //! \brief Defines the analog voltage filter pole location, Hz #define USER_M1_VOLTAGE_FILTER_POLE_Hz (781.0f) // caps=47nF //! \brief Defines the maximum current at the AD converter //Rshunt=7momh //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (94.28571429f) // CSA_GAIN=5VpV //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (47.14285714f) // CSA_GAIN=10VpV //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (23.57142857f) // CSA_GAIN=20VpV //Rshunt=2momh //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (330.0f) // CSA_GAIN=5VpV //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (165.0f) // CSA_GAIN=10VpV //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (82.5f) // CSA_GAIN=20VpV //Rshunt=1momh #define USER_M1_ADC_FULL_SCALE_CURRENT_A (660.0f) // CSA_GAIN=5VpV //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (330.0f) // CSA_GAIN=10VpV //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (165.0f) // CSA_GAIN=20VpV #if defined(MOTOR1_DCLINKSS) || defined(MOTOR1_ISBLDC) //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (-1.0f) //! \brief ADC current offsets for dc-link // the dc-link offset current for BSXL8323RS_REVA #define USER_M1_IDC_OFFSET_A (USER_M1_ADC_FULL_SCALE_CURRENT_A / 2.0f) //! \brief ADC current offsets for A, B, and C phases #define USER_M1_IDC_OFFSET_AD (2048.0f) #define USER_M1_IDC_OFFSET_AD_MAX (USER_M1_IDC_OFFSET_AD + 100.0f) #define USER_M1_IDC_OFFSET_AD_MIN (USER_M1_IDC_OFFSET_AD - 100.0f) #else //!MOTOR1_DCLINKSS //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (1.0f) //! \brief ADC current offsets for A, B, and C phases // the ADC current offsets for A/B/C phases, one-time hardware dependent //#define USER_M1_IA_OFFSET_AD (2030.99646f) //#define USER_M1_IB_OFFSET_AD (2016.76001f) //#define USER_M1_IC_OFFSET_AD (2007.99329f) #define USER_M1_IA_OFFSET_AD (2048.0f) #define USER_M1_IB_OFFSET_AD (2048.0f) #define USER_M1_IC_OFFSET_AD (2048.0f) //! \brief ADC current offset for CMPSS #define USER_M1_IS_OFFSET_CMPSS (uint16_t)((USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD) / 3.0f) //! \brief ADC voltage offsets for A, B, and C phases // the ADC voltage offsets for A/B/C phases, one-time hardware dependent #define USER_M1_VA_OFFSET_SF (0.498977453f) #define USER_M1_VB_OFFSET_SF (0.497419506f) #define USER_M1_VC_OFFSET_SF (0.500700474f) #endif // !MOTOR1_DCLINKSS //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (54.5f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (52.5f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (8.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (10.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.2f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (1500.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (1500.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! unit: N.m #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of BSXL8323RS_REVA //------------------------------------------------------------------------------ #elif defined(BSXL8323RH_REVB) // LaunchPad-F280025 //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (48.0f) //! \brief Defines the maximum voltage at the AD converter #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (57.52845691f) //! \brief Defines the analog voltage filter pole location, Hz #define USER_M1_VOLTAGE_FILTER_POLE_Hz (680.4839141f) // 47nF //! \brief Defines the maximum current at the AD converter //! Place a 47k(ohm) resistor (R22) pull-down on MODE pin #define USER_M1_ADC_FULL_SCALE_CURRENT_A (47.14285714f) // gain=10 #if defined(MOTOR1_DCLINKSS) || defined(MOTOR1_ISBLDC) //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (-1.0f) //! \brief ADC current offsets for dc-link // the dc-link offset current for BSXL8323RH_REVB #define USER_M1_IDC_OFFSET_A (USER_M1_ADC_FULL_SCALE_CURRENT_A / 2.0f) //! \brief ADC current offsets for dc-link #define USER_M1_IDC_OFFSET_AD (2048.0f) #define USER_M1_IDC_OFFSET_AD_MAX (USER_M1_IDC_OFFSET_AD + 100.0f) #define USER_M1_IDC_OFFSET_AD_MIN (USER_M1_IDC_OFFSET_AD - 100.0f) #else //!MOTOR1_DCLINKSS //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (1.0f) //! \brief ADC current offsets for A, B, and C phases #define USER_M1_IA_OFFSET_AD (2045.40015f) #define USER_M1_IB_OFFSET_AD (2012.86694f) #define USER_M1_IC_OFFSET_AD (2031.59741f) //! \brief ADC current offset for CMPSS #define USER_M1_IS_OFFSET_CMPSS (uint16_t)((USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD) / 3.0f) //! \brief ADC voltage offsets for A, B, and C phases #define USER_M1_VA_OFFSET_SF (0.507042527f) #define USER_M1_VB_OFFSET_SF (0.505379438f) #define USER_M1_VC_OFFSET_SF (0.50771445f) #endif // !MOTOR1_DCLINKSS //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (54.5f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (52.5f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (8.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (10.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.01f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (90.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (1800.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of BSXL8323RH_REVB //------------------------------------------------------------------------------ #elif defined(BSXL8353RS_REVA) //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (48.0f) //! \brief Defines the maximum voltage at the AD converter #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (132.7979508f) //! \brief Defines the analog voltage filter pole location, Hz #define USER_M1_VOLTAGE_FILTER_POLE_Hz (338.1100618f) // 9.76k/47nF //! \brief Defines the maximum current at the AD converter //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (94.28571429f) // gain=5 #define USER_M1_ADC_FULL_SCALE_CURRENT_A (47.14285714f) // gain=10 #if defined(MOTOR1_DCLINKSS) || defined(MOTOR1_ISBLDC) //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (-1.0f) #error "Single shunt is not supported on this kit" #else //!MOTOR1_DCLINKSS //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (1.0f) //! \brief ADC current offsets for A, B, and C phases #define USER_M1_IA_OFFSET_AD (2048.0f) #define USER_M1_IB_OFFSET_AD (2048.0f) #define USER_M1_IC_OFFSET_AD (2048.0f) //! \brief ADC current offset for CMPSS #define USER_M1_IS_OFFSET_CMPSS (uint16_t)((USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD) / 3.0f) //! \brief ADC voltage offsets for A, B, and C phases #define USER_M1_VA_OFFSET_SF (0.500514159f) #define USER_M1_VB_OFFSET_SF (0.506255884f) #define USER_M1_VC_OFFSET_SF (0.503381569f) #endif // !MOTOR1_DCLINKSS //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (40.0f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (36.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (10.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (12.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.2f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (50.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (500.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of BSXL8353RS_REVA //------------------------------------------------------------------------------ #elif defined(BSXL3PHGAN_REVA) //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (48.0f) //! \brief Defines the maximum voltage at the AD converter #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (81.49905213f) //! \brief Defines the analog voltage filter pole location, Hz #define USER_M1_VOLTAGE_FILTER_POLE_Hz (1103.026917f) // 33nF //! \brief Defines the maximum current at the AD converter #define USER_M1_ADC_FULL_SCALE_CURRENT_A (33.0f) // gain=20 //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the inline shunt resistor is connected to the //! output of the three-phase power inverter and is also connected to //! the inverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is positive that //! means the same pin of the inline shunt resistor is connected to the //! output of the three-phase power inverter and is also connected to //! the non-inverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (-1.0f) //! \brief ADC current offsets for A, B, and C phases #define USER_M1_IA_OFFSET_AD (2048.0f) #define USER_M1_IB_OFFSET_AD (2048.0f) #define USER_M1_IC_OFFSET_AD (2048.0f) //! \brief ADC current offset for CMPSS #define USER_M1_IS_OFFSET_CMPSS (uint16_t)((USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD) / 3.0f) //! \brief ADC voltage offsets for A, B, and C phases #define USER_M1_VA_OFFSET_SF (0.500514159f) #define USER_M1_VB_OFFSET_SF (0.506255884f) #define USER_M1_VC_OFFSET_SF (0.503381569f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (40.0f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (36.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (10.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (12.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.2f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (50.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (500.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of BSXL3PHGAN_REVA //------------------------------------------------------------------------------ #elif defined(BSXL8316RT_REVA) //! \brief Defines the nominal DC bus voltage, V //! #define USER_M1_NOMINAL_DC_BUS_VOLTAGE_V (48.0f) //! \brief Defines the maximum voltage at the AD converter #define USER_M1_ADC_FULL_SCALE_VOLTAGE_V (44.28f) //! \brief Defines the analog voltage filter pole location, Hz #define USER_M1_VOLTAGE_FILTER_POLE_Hz (284.722f) // 100nF //! \brief Defines the maximum current at the AD converter //! DRV8316 = VREF = 3V, GAIN = 0.15V/A || 3.3V / 0.15V/A = 22.0A //! GAIN = 0.30V/A || 3.3V / 0.30V/A = 11.0A //! GAIN = 0.60V/A || 3.3V / 0.60V/A = 5.50A //! GAIN = 1.20V/A || 3.3V / 1.20V/A = 2.75A //! Change this ADC scale current value that must match the CSA gain in hal.c #define USER_M1_ADC_FULL_SCALE_CURRENT_A (22.0f) // GAIN = 0.15V/A //#define USER_M1_ADC_FULL_SCALE_CURRENT_A (11.0f) // GAIN = 0.30V/A //! \brief Defines the sign of the current_sf based on //! the polarity of the current feedback circuit //! //! the "sign" = -1.0f if the current feedback polarity is positive that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the inverting pin of the operational amplifier //! //! the "sign" = 1.0f if the current feedback polarity is negative that //! means the same pin of the shunt resistor is connected to ground and //! is also connected to the noninverting pin of the operational amplifier #define USER_M1_SIGN_CURRENT_SF (1.0f) //! \brief ADC current offsets for A, B, and C phases #define USER_M1_IA_OFFSET_AD (1869.6f) #define USER_M1_IB_OFFSET_AD (1877.3f) #define USER_M1_IC_OFFSET_AD (1876.9f) //! \brief ADC current offset for CMPSS #define USER_M1_IS_OFFSET_CMPSS (uint16_t)((USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD) / 3.0f) //! \brief ADC voltage offsets for A, B, and C phases #define USER_M1_VA_OFFSET_SF (0.477463514f) #define USER_M1_VB_OFFSET_SF (0.479326069f) #define USER_M1_VC_OFFSET_SF (0.477675498f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_FAULT_V (40.0f) //! \brief DC bus over voltage threshold #define USER_M1_OVER_VOLTAGE_NORM_V (36.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_FAULT_V (10.0f) //! \brief DC bus under voltage threshold #define USER_M1_UNDER_VOLTAGE_NORM_V (12.0f) //! \brief motor lost phase current threshold #define USER_M1_LOST_PHASE_CURRENT_A (0.2f) //! \brief motor unbalance ratio percent threshold #define USER_M1_UNBALANCE_RATIO (0.2f) //! \brief motor over load power threshold #define USER_M1_OVER_LOAD_POWER_W (50.0f) //! \brief motor stall current threshold #define USER_M1_STALL_CURRENT_A (10.0f) //! \brief motor fault check current threshold #define USER_M1_FAULT_CHECK_CURRENT_A (0.2f) //! \brief motor failed maximum speed threshold #define USER_M1_FAIL_SPEED_MAX_HZ (500.0f) //! \brief motor failed minimum speed threshold #define USER_M1_FAIL_SPEED_MIN_HZ (5.0f) //! \brief Defines the number of failed torque //! #define USER_M1_TORQUE_FAILED_SET (0.000001f) // end of BSXL8316RT_REVA //------------------------------------------------------------------------------ //------------------------------------------------------------------------------ //------------------------------------------------------------------------------ #else // No Board Selection #error The board parameters are not defined in user_mtr1.h #endif // No Board Selection //------------------------------------------------------------------------------ //! \brief ADC current offsets checking value for A, B, and C phases // the error threshold to check if the ADC offset of the phase current sensing circuit is correct. #define USER_M1_IS_OFFSET_AD_DELTA (150.0f) // The value is 0.0f~1024.0f // the high threshold of the ADC offsets checking value for A/B/C phase current #define USER_M1_IA_OFFSET_AD_MAX (USER_M1_IA_OFFSET_AD + USER_M1_IS_OFFSET_AD_DELTA) #define USER_M1_IB_OFFSET_AD_MAX (USER_M1_IB_OFFSET_AD + USER_M1_IS_OFFSET_AD_DELTA) #define USER_M1_IC_OFFSET_AD_MAX (USER_M1_IC_OFFSET_AD + USER_M1_IS_OFFSET_AD_DELTA) // the low threshold of the ADC offsets checking value for A phase current #define USER_M1_IA_OFFSET_AD_MIN (USER_M1_IA_OFFSET_AD - USER_M1_IS_OFFSET_AD_DELTA) #define USER_M1_IB_OFFSET_AD_MIN (USER_M1_IB_OFFSET_AD - USER_M1_IS_OFFSET_AD_DELTA) #define USER_M1_IC_OFFSET_AD_MIN (USER_M1_IC_OFFSET_AD - USER_M1_IS_OFFSET_AD_DELTA) #define USER_M1_IS_OFFSET_AD_MAX (USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD + (USER_M1_IS_OFFSET_AD_DELTA * 3.0f)) #define USER_M1_IS_OFFSET_AD_MIN (USER_M1_IA_OFFSET_AD + USER_M1_IB_OFFSET_AD + USER_M1_IC_OFFSET_AD - (USER_M1_IS_OFFSET_AD_DELTA * 3.0f)) //! \brief ADC voltage offsets for A, B, and C phases // the error threshold to check if the ADC offset of the phase voltage sensing circuit is correct #define USER_M1_VA_OFFSET_SF_DELTA (0.05f) // The value is 0.0f ~ 0.5f // the high threshold of the ADC offsets checking value for A/B/C phase voltage #define USER_M1_VA_OFFSET_SF_MAX (USER_M1_VA_OFFSET_SF + USER_M1_VA_OFFSET_SF_DELTA) #define USER_M1_VB_OFFSET_SF_MAX (USER_M1_VB_OFFSET_SF + USER_M1_VA_OFFSET_SF_DELTA) #define USER_M1_VC_OFFSET_SF_MAX (USER_M1_VC_OFFSET_SF + USER_M1_VA_OFFSET_SF_DELTA) // the low threshold of the ADC offsets checking value for A/B/C phase voltage #define USER_M1_VA_OFFSET_SF_MIN (USER_M1_VA_OFFSET_SF - USER_M1_VA_OFFSET_SF_DELTA) #define USER_M1_VB_OFFSET_SF_MIN (USER_M1_VB_OFFSET_SF - USER_M1_VA_OFFSET_SF_DELTA) #define USER_M1_VC_OFFSET_SF_MIN (USER_M1_VC_OFFSET_SF - USER_M1_VA_OFFSET_SF_DELTA) #define USER_M1_VS_OFFSET_SF_MAX (USER_M1_VA_OFFSET_SF + USER_M1_VB_OFFSET_SF + USER_M1_VC_OFFSET_SF + (USER_M1_VA_OFFSET_SF_DELTA * 3.0f)) #define USER_M1_VS_OFFSET_SF_MIN (USER_M1_VA_OFFSET_SF + USER_M1_VB_OFFSET_SF + USER_M1_VC_OFFSET_SF - (USER_M1_VA_OFFSET_SF_DELTA * 3.0f)) //****************************************************************************** //! \brief Defines the number of pwm clock ticks per isr clock tick //! Note: Valid values are 1, 2 or 3 only #define USER_M1_NUM_PWM_TICKS_PER_ISR_TICK (2) //! \brief Defines the number of ISR clock ticks per current controller clock tick //! #define USER_M1_NUM_ISR_TICKS_PER_CURRENT_TICK (1) //! \brief Defines the number of ISR clock ticks per speed controller clock tick //! #define USER_M1_NUM_ISR_TICKS_PER_SPEED_TICK (10) //! \brief Defines the number of current sensors //! #define USER_M1_NUM_CURRENT_SENSORS (3) //! \brief Defines the number of voltage sensors //! #define USER_M1_NUM_VOLTAGE_SENSORS (3) //! \brief Defines the Pulse Width Modulation (PWM) frequency, kHz //! #define USER_M1_PWM_FREQ_kHz (40.0f) #define USER_M1_PWM_TBPRD_NUM (uint16_t)(USER_SYSTEM_FREQ_MHz * 1000.0f / USER_M1_PWM_FREQ_kHz / 2.0f) //! \brief Defines the Pulse Width Modulation (PWM) period, usec //! #define USER_M1_PWM_PERIOD_usec (1000.0f / USER_M1_PWM_FREQ_kHz) //! \brief Defines the Interrupt Service Routine (ISR) frequency, Hz //! #define USER_M1_ISR_FREQ_Hz (USER_M1_PWM_FREQ_kHz * 1000.0f / (float32_t)USER_M1_NUM_PWM_TICKS_PER_ISR_TICK) //! \brief Defines the Interrupt Service Routine (ISR) period, usec //! #define USER_M1_ISR_PERIOD_usec (USER_M1_PWM_PERIOD_usec * (float32_t)USER_M1_NUM_PWM_TICKS_PER_ISR_TICK) //! \brief Defines the direct voltage (Vd) scale factor //! #define USER_M1_VD_SF (0.95f) //! \brief Defines the voltage scale factor for the system //! #define USER_M1_VOLTAGE_SF (USER_M1_ADC_FULL_SCALE_VOLTAGE_V / 4096.0f) //! \brief Defines the current scale factor for the system //! #define USER_M1_CURRENT_SF (USER_M1_ADC_FULL_SCALE_CURRENT_A / 4096.0f) //! \brief Defines the current scale invert factor for the system //! #define USER_M1_CURRENT_INV_SF (4096.0f / USER_M1_ADC_FULL_SCALE_CURRENT_A) //! \brief Defines the analog voltage filter pole location, rad/s //! #define USER_M1_VOLTAGE_FILTER_POLE_rps (MATH_TWO_PI * USER_M1_VOLTAGE_FILTER_POLE_Hz) //! \brief Defines the maximum Vs magnitude in per units allowed //! \brief This value sets the maximum magnitude for the output of the Id and //! \brief Iq PI current controllers. The Id and Iq current controller outputs //! \brief are Vd and Vq. The relationship between Vs, Vd, and Vq is: //! \brief Vs = sqrt(Vd^2 + Vq^2). In this FOC controller, the Vd value is set //! \brief equal to USER_MAX_VS_MAG*USER_VD_MAG_FACTOR. //! \brief so the Vq value is set equal to sqrt(USER_MAX_VS_MAG^2 - Vd^2). //! //! \brief Set USER_MAX_VS_MAG = 0.5 for a pure sinewave with a peak at //! \brief SQRT(3)/2 = 86.6% duty cycle. No current reconstruction //! \brief is needed for this scenario. //! //! \brief Set USER_MAX_VS_MAG = 1/SQRT(3) = 0.5774 for a pure sinewave //! \brief with a peak at 100% duty cycle. Current reconstruction //! \brief will be needed for this scenario (Lab08). //! //! \brief Set USER_MAX_VS_MAG = 2/3 = 0.6666 to create a trapezoidal //! \brief voltage waveform. Current reconstruction will be needed //! \brief for this scenario (Lab08). //! //! \brief For space vector over-modulation, see lab08 for details on //! \brief system requirements that will allow the SVM generator to //! \brief go all the way to trapezoidal. //! //#define USER_M1_MAX_VS_MAG_PU (0.66f) //#define USER_M1_MAX_VS_MAG_PU (0.65f) #define USER_M1_MAX_VS_MAG_PU (0.576f) //#define USER_M1_MAX_VS_MAG_PU (0.565f) //#define USER_M1_MAX_VS_MAG_PU (0.5f) //! \brief Defines the reference Vs magnitude in per units allowed //! \ Set the value equal from 0.5 to 0.95 of the maximum Vs magnitude #define USER_M1_VS_REF_MAG_PU (0.8f * USER_MAX_VS_MAG_PU) //! \brief Defines the R/L excitation frequency, Hz //! #define USER_M1_R_OVER_L_EXC_FREQ_Hz (300.0f) //! \brief Defines the R/L Kp scale factor, pu //! \brief Kp used during R/L is USER_M1_R_OVER_L_KP_SF * USER_M1_NOMINAL_DC_BUS_VOLTAGE_V / USER_MOTOR1_MAX_CURRENT_A; //! #define USER_M1_R_OVER_L_KP_SF (0.02f) //! \brief Defines maximum acceleration for the estimation speed profiles, Hz/sec //! #define USER_M1_MAX_ACCEL_Hzps (2.0f) //! \brief Defines the controller execution period, usec //! #define USER_M1_CTRL_PERIOD_usec ((float32_t)USER_M1_ISR_PERIOD_usec) //! \brief Defines the controller execution period, sec //! #define USER_M1_CTRL_PERIOD_sec ((float32_t)USER_M1_CTRL_PERIOD_usec / 1000000.0f) //! \brief Defines the IdRated delta to use during estimation //! #define USER_M1_IDRATED_DELTA_A (0.0001f) #if defined(_FULL_FAST_LIB) //! \brief Defines the forced angle frequency, Hz #define USER_M1_FORCE_ANGLE_FREQ_Hz (1.0f) //! \brief Defines the forced angle acceleration, Hz #define USER_M1_FORCE_ANGLE_ACCEL_Hzps (10.0f) #else // !_FULL_FAST_LIB //! \brief Defines the forced angle frequency, Hz #define USER_M1_FORCE_ANGLE_FREQ_Hz (1.0f) #endif // !_FULL_FAST_LIB //! \brief Defines the near zero speed limit for electrical frequency estimation, Hz //! The flux integrator uses this limit to regulate flux integration #define USER_M1_FREQ_NEARZEROSPEEDLIMIT_Hz (0.0f) //! \brief Defines the fraction of IdRated to use during inductance estimation //! #define USER_M1_IDRATED_FRACTION_FOR_L_IDENT (0.5f) //! \brief Defines the fraction of SpeedMax to use during inductance estimation //! #define USER_M1_SPEEDMAX_FRACTION_FOR_L_IDENT (1.0f) //! \brief Defines the Power Warp gain for computing Id reference //! #define USER_M1_PW_GAIN (1.0f) //! \brief Defines the pole location for the DC bus filter, rad/sec //! #define USER_M1_DCBUS_POLE_rps (100.0f) //! \brief Defines the pole location for the voltage and current offset estimation, rad/s //! #define USER_M1_OFFSET_POLE_rps (20.0f) //! \brief Defines the pole location for the speed control filter, rad/sec //! #define USER_M1_SPEED_POLE_rps (100.0f) //! \brief Defines the pole location for the direction filter, rad/sec //! #define USER_M1_DIRECTION_POLE_rps (MATH_TWO_PI * 10.0f) //! \brief Defines the pole location for the flux estimation, rad/sec //! #define USER_M1_FLUX_POLE_rps (10.0f) //! \brief Defines the pole location for the R/L estimation, rad/sec //! #define USER_M1_R_OVER_L_POLE_rps (MATH_TWO_PI * 3.2f) //! \brief Defines the convergence factor for the estimator //! #define USER_M1_EST_KAPPAQ (1.5f) //! \brief Defines the scale factor for the flux estimation //! the default value is 1.0f, change the value between 0.1f and 1.25f //! //#define USER_M1_EST_FLUX_HF_SF (0.120f) #define USER_M1_EST_FLUX_HF_SF (0.250f) //#define USER_M1_EST_FLUX_HF_SF (1.00f) //! \brief Defines the scale factor for the frequency estimation //! the default value is 1.0f, change the value between 0.5f and 1.5f //! #define USER_M1_EST_FREQ_HF_SF (1.00f) //! \brief Defines the scale factor for the bemf estimation //! the default value is 1.0f, change the value between 0.50f and 1.25f //! #define USER_M1_EST_BEMF_HF_SF (1.00f) //------------------------------------------------------------------------------ //! brief Define the Kp gain for Field Weakening Control #define USER_M1_FWC_KP 0.0525f //! brief Define the Ki gain for Field Weakening Control #define USER_M1_FWC_KI 0.00325f //! brief Define the maximum current vector angle for Field Weakening Control #define USER_M1_FWC_MAX_ANGLE -15.0f // degree #define USER_M1_FWC_MAX_ANGLE_RAD USER_M1_FWC_MAX_ANGLE /180.0f * MATH_PI // rad //! brief Define the minimum current vector angle for Field Weakening Control #define USER_M1_FWC_MIN_ANGLE 0.0f // degree #define USER_M1_FWC_MIN_ANGLE_RAD USER_M1_FWC_MIN_ANGLE /180.0f * MATH_PI // rad //! \brief Defines the number of DC bus over/under voltage setting time //! timer base = 5ms #define USER_M1_VOLTAGE_FAULT_TIME_SET (500U) // in 5ms //! \brief Defines the number of motor over load setting time //! timer base = 5ms, 1s #define USER_M1_OVER_LOAD_TIME_SET (200U) //! \brief Defines the number of motor stall setting time //! timer base = 5ms, 1s #define USER_M1_STALL_TIME_SET (200U) //! \brief Defines the number of phase unbalanced setting time //! timer base = 5ms, 5s #define USER_M1_UNBALANCE_TIME_SET (1000U) //! \brief Defines the number of lost phase setting time //! timer base = 5ms, 10s #define USER_M1_LOST_PHASE_TIME_SET (2000U) //! \brief Defines the number of over speed setting time //! timer base = 5ms #define USER_M1_OVER_SPEED_TIME_SET (600U) //! \brief Defines the number of startup failed setting time //! timer base = 5ms, 10s #define USER_M1_STARTUP_FAIL_TIME_SET (2000U) //! \brief Defines the number of over load setting times //! #define USER_M1_OVER_CURRENT_TIMES_SET (5U) //! \brief Defines the number of stop wait time //! timer base = 5ms, 10s #define USER_M1_STOP_WAIT_TIME_SET (2000U) //! \brief Defines the number of restart wait time //! timer base = 5ms, 10s #define USER_M1_RESTART_WAIT_TIME_SET (2000U) //! \brief Defines the number of restart times when has a fault //! #define USER_M1_START_TIMES_SET (3U) //! \brief Defines the alignment time //! timer base = 5ms, 10s #define USER_M1_ALIGN_TIME_SET (2000U) //! \brief Defines the QEP unit ticks #define USER_M1_QEP_UNIT_TIMER_TICKS (uint32_t)(USER_SYSTEM_FREQ_MHz/(2.0f * USER_M1_ISR_FREQ_Hz) * 1000000.0f) //! \brief Defines the current filter pole location, Hz #define USER_M1_IS_FILTER_POLE_Hz (7500.0f) // 7.5kHz //! \brief Defines the current filter pole location, rad/s //! #define USER_M1_IS_FILTER_POLE_rps (MATH_TWO_PI * USER_M1_IS_FILTER_POLE_Hz) //! \brief Defines the voltage filter pole location, Hz #define USER_M1_VS_FILTER_POLE_Hz (30000.0f) // 30.0kHz //! \brief Defines the voltage filter pole location, rad/s //! #define USER_M1_VS_FILTER_POLE_rps (MATH_TWO_PI * USER_M1_VS_FILTER_POLE_Hz) //============================================================================== // Only a few listed motor below are tested with the related algorithm as the comments // Motor defines // High voltage PMSM Motors //#define USER_MOTOR1 Estun_EMJ_04APB22 //* Tested, FAST/eSMO/ENC //#define USER_MOTOR1 Anaheim_BLWS235D //* Tested, FAST //#define USER_MOTOR1 CHMotor_WM_Test //#define USER_MOTOR1 Anaheim_BLZ362S //#define USER_MOTOR1 ziehlab_Fan160hv //* Tested, FAST/eSMO //#define USER_MOTOR1 embpast_Fan160hv //* Tested, FAST/eSMO //#define USER_MOTOR1 GMCC_KSK89D53U //* Tested, FAST/eSMO //#define USER_MOTOR1 QXA_A091ZE190A //* Tested, FAST/eSMO //#define USER_MOTOR1 Baldor_BSM90N175 //* Tested, FAST/eSMO //#define USER_MOTOR1 Marathon_N56PNRA10102 //* Tested, FAST // Low Voltage PMSM Motors //#define USER_MOTOR1 Anaheim_BLY172S_24V //* Tested, FAST/eSMO/HALL/ENC(MD) //#define USER_MOTOR1 Teknic_M2310PLN04K //* Tested, FAST/eSMO/ENC/HALL //#define USER_MOTOR1 Nedic_EPSMS037_D12V //#define USER_MOTOR1 Anaheim_BLY341S_48V //#define USER_MOTOR1 Anaheim_BLY341S_Y24V //#define USER_MOTOR1 Anaheim_BLY341S_D24V //#define USER_MOTOR1 Drone_DJI920KV //* Tested, FAST //#define USER_MOTOR1 Drone_BLK2BLADE //* Tested, FAST //#define USER_MOTOR1 Drone_SENSEFLY //* Tested, FAST //#define USER_MOTOR1 Drone_SF_Black //* Tested, FAST //#define USER_MOTOR1 Drone9616_110KV_48V //* Tested, FAST //#define USER_MOTOR1 Tamagawa_TS4606N8302 //* Tested, FAST/Resolver //#define USER_MOTOR1 AKM21G_CK9NGE00 //* Tested, FAST/sin&cos encoder //#define USER_MOTOR1 AirFan_MFA0500_24V //* Tested, FAST //#define USER_MOTOR1 Tool_Makita_GFD01 //* Tested, FAST // ACI Motor //#define USER_MOTOR1 Marathon_5K33GN2A //#define USER_MOTOR1 Marathon_56H17T2011A //#define USER_MOTOR1 Dayton_3N352C //#define USER_MOTOR1 EMSYNERGY_LVACI #define USER_MOTOR1 my_pm_motor_1 //#define USER_MOTOR1 my_aci_motor_2 //------------------------------------------------------------------------------ #if (USER_MOTOR1 == Teknic_M2310PLN04K) // the motor type #define USER_MOTOR1_TYPE MOTOR_TYPE_PM // the number of pole pairs of the motor #define USER_MOTOR1_NUM_POLE_PAIRS (4) // the rotor resistance value of the motor, in Ohm #define USER_MOTOR1_Rr_Ohm (NULL) // the stator resistance value of the motor, in Ohm #define USER_MOTOR1_Rs_Ohm (0.393955578f) // the stator inductance value of the motor in the direct direction, in H #define USER_MOTOR1_Ls_d_H (0.000190442806f) // the stator inductance value of the motor in the quadrature direction, in H #define USER_MOTOR1_Ls_q_H (0.000190442806f) // the rated flux value of the motor, in V/Hz #define USER_MOTOR1_RATED_FLUX_VpHz (0.0399353318f) // the Id rated current value of the motor, in A. Induction motors only #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) // the maximum current value for stator resistance (R_s) identification, in A #define USER_MOTOR1_RES_EST_CURRENT_A (1.5f) // the maximum current value to use for stator inductance identification, in A #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) // the maximum current value of the motor, in A #define USER_MOTOR1_MAX_CURRENT_A (6.6f) // the R/L excitation frequency for motor parameters identification, in Hz #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (60.0f) // the inertia that describes the amount of mass, in Kg.m2 #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-06) // the rated voltage of the motor, V #define USER_MOTOR1_RATED_VOLTAGE_V (24.0f) // V // the minimum rotation frequency if the motor (Hz) #define USER_MOTOR1_FREQ_MIN_Hz (9.0f) // Hz // the maximum/base rotation frequency of the motor (Hz) #define USER_MOTOR1_FREQ_MAX_Hz (600.0f) // Hz // V/f Profile Parameters for open-loop in build level 2 // the low frequency f_low of V/f profile, in Hz, // set to 10% of rated motor frequency #define USER_MOTOR1_FREQ_LOW_Hz (5.0f) // Hz // the high frequency f_high of V/f profile, in Hz, // set to 100% of rated motor frequency #define USER_MOTOR1_FREQ_HIGH_Hz (400.0f) // Hz // the minimum voltage V_min of V/f profile, // the value is suggested to set to 15% of rated motor voltage, in Volt. #define USER_MOTOR1_VOLT_MIN_V (1.0f) // Volt // the maximum voltage, V_max of V/f profile, // the value is suggested to set to 100% of rated motor voltage, in Volt #define USER_MOTOR1_VOLT_MAX_V (24.0f) // Volt // the current increasing delta value for running the motor with force open-loop , in A #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A // the current increasing delta value for motor rotor alignment, in A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A // the current for running the motor with force open-loop, in A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A // the current for motor rotor alignment, in A #define USER_MOTOR1_ALIGN_CURRENT_A (1.5f) // A // the current for start to run motor with closed-loop when the speed is // lower than the startup setting speed, in A #define USER_MOTOR1_STARTUP_CURRENT_A (3.5f) // A // the current for running the motor with torque control mode when start the motor, in A. #define USER_MOTOR1_TORQUE_CURRENT_A (3.0f) // A // the over-current threshold for the motor, in A. // The value can be set to 50%~300% of the rated current of the motor #define USER_MOTOR1_OVER_CURRENT_A (7.5f) // A // the speed threshold for start the motor, in Hz #define USER_MOTOR1_SPEED_START_Hz (35.0f) // Hz // the speed threshold for running the motor with force open-loop, in Hz #define USER_MOTOR1_SPEED_FORCE_Hz (30.0f) // Hz // the acceleration for start the motor, in Hz/s. #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s // the maximum acceleration for running the motor, in Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s // the speed threshold for running the motor with flying start mode, in Hz #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Hz // the current for motor brake, in A. #define USER_MOTOR1_BRAKE_CURRENT_A (1.0f) // A // the duration time for motor brake, in 5ms time base #define USER_MOTOR1_BRAKE_TIME_DELAY (12000U) // 60s/5ms #if defined(MOTOR1_FAST) // the slope coefficient for Ld compensation, (0.0f~0.5f) #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f // the slope coefficient for Lq compensation, (0.0f~0.5f) #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f // the minimum inductance coefficient for inductance compensation, (0.0f~0.5f) #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f // the near zero speed limit for electrical frequency estimation, Hz. // The flux integrator uses this limit to regulate flux integration #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz // the waiting time without enabling the Rs online clibrartion, in 5ms #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base // the the duration time with enabling the Rs online clibrartion, in 5ms #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base #endif // MOTOR1_FAST #if defined(MOTOR1_ESMO) // Only for eSMO // PLL (phase-locked loop) // PID proportional, integral, derivative // the sliding mode control maximum gain that equals to Ke*fmax/vscale/sqrt(2)*factor(max), // tune the factor(0.1~10) based the test status #define USER_MOTOR1_KSLIDE_MAX (0.50f) // the sliding mode control minimum gain that equals to Ke*fmin/vscale/sqrt(2)*factor(min), // tune the factor(0.1~10) based the test status #define USER_MOTOR1_KSLIDE_MIN (0.10f) // the PLL control maximum gain that equals to 2*(Damping factor)*(Natural frequency)*factor(max), // tune the factor(0.1~10) based the test status #define USER_MOTOR1_PLL_KP_MAX (10.0f) // the PLL control minimum gain that equals to 2*(Damping factor)*(Natural frequency)*factor(min), // tune the factor(0.1~5) based the test status #define USER_MOTOR1_PLL_KP_MIN (1.50f) // the PLL control gain adjusting coefficient that // equals to (Kpll_max-Kpll_min)/fscale/fmax #define USER_MOTOR1_PLL_KP_SF (5.0f) // the phase-locked loop control integration gain that // equals to (Natural frequency)*(Natural frequency)*Ts #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve // the threshold of the estimated current error for sliding mode control that // equals to (motor maximum BEMF voltage / rated voltage), (0.3~0.5 ) #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) // the parameters of the low-pass filter for the estimated back EMF, // Kslf equal to (fc*2*PI()*Ts), (0.5~2.5) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // the offset coefficient to compensate the error by using // the low-pass filter that equals to 1.0, or [0.5~1.5] #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // the cut-off frequency of the low-pass filter to calculate the estimated speed, (100~400) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) #endif // MOTOR1_ESMO #if defined(MOTOR1_ENC) // Only for encoder #define USER_MOTOR1_NUM_ENC_SLOTS (1000) // lines #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // lines #endif // MOTOR1_ENC #if defined(MOTOR1_HALL) // Only for hall sensor #define USER_MOTOR1_HALL_DELTA_rad (MATH_TWO_PI / 36.0f) // rad #endif // MOTOR1_HALL #if defined(MOTOR1_ISBLDC) // Only for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (3.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (5) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) #endif // MOTOR1_ISBLDC // Current and Speed PI Regulators Tuning Coefficient // the low speed threshold for adjusting the Kp and Ki of the speed PI regulator #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) // 10%~50% of the rated speed // the high speed threshold for adjusting the Kp and Ki of the speed PI regulator #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) // 50%~100% of the rated speed // the gain coefficient to adjust the Kp of the speed PI regulator for startup #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 // the gain coefficient to adjust the Ki of the speed PI regulator for startup #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 // the low gain coefficient to adjust the Kp of the speed PI regulator #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 // the low gain coefficient to adjust the Ki of the speed PI regulator #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 // the high gain coefficient to adjust the Kp of the speed PI regulator #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 // the high gain coefficient to adjust the Ki of the speed PI regulator #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 // the low current threshold to adjust the Kp and Ki of the q-axis current PI regulator #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) // 10%~50% of the rated current // the high current threshold to adjust the Kp and Ki of the q-axis current PI regulator #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) // 50%~100% of the rated current // the gain coefficient to adjust the Kp of the q-axis current PI regulator for startup #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 // the gain coefficient to adjust the Ki of the q-axis current PI regulator for startup #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 // the low gain coefficient to adjust the Kp of the q-axis current PI regulator #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 // the low gain coefficient to adjust the Ki of the q-axis current PI regulator #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 // the high gain coefficient to adjust the Kp of the d-axis current PI regulator #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 // the high gain coefficient to adjust the Ki of the d-axis current PI regulator #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 // the gain coefficient to adjust the Kp of the q-axis current PI regulator #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 // the gain coefficient to adjust the Ki of the q-axis current PI regulator #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //----------------------------------------------------------------------------- #elif (USER_MOTOR1 == Estun_EMJ_04APB22) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (0.0f) #define USER_MOTOR1_Rs_Ohm (2.62655902f) #define USER_MOTOR1_Ls_d_H (0.00860825367f) #define USER_MOTOR1_Ls_q_H (0.00860825367f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.377903223f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.0f) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) #define USER_MOTOR1_MAX_CURRENT_A (5.0f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0f) #define USER_MOTOR1_NUM_ENC_SLOTS (2500) #define USER_MOTOR1_INERTIA_Kgm2 (3.100017e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (1.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (4.5f) // A #define USER_MOTOR1_SPEED_START_Hz (30.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //------------------------------------------------------------------------------ #elif (USER_MOTOR1 == Tool_Makita_GFD01) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (NULL) // 15kHz //#define USER_MOTOR1_Rs_Ohm (0.0253030714f) //#define USER_MOTOR1_Ls_d_H (2.89102645e-05f) //#define USER_MOTOR1_Ls_q_H (2.89102645e-05f) //#define USER_MOTOR1_RATED_FLUX_VpHz (0.0242515542f) //// 25kHz //#define USER_MOTOR1_Rs_Ohm (0.0250713862f) //#define USER_MOTOR1_Ls_d_H (2.84397684e-05f) //#define USER_MOTOR1_Ls_q_H (2.84397684e-05f) //#define USER_MOTOR1_RATED_FLUX_VpHz (0.0242347941f) // 20kHz #define USER_MOTOR1_Rs_Ohm (0.0379858911f) #define USER_MOTOR1_Ls_d_H (0.000106012929f) #define USER_MOTOR1_Ls_q_H (0.000106012929f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0138726495f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (5.0f) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.5f) #define USER_MOTOR1_MAX_CURRENT_A (25.0f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (100.0f) #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-06) // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (36.0f) // V #define USER_MOTOR1_FREQ_MIN_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (1500.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (1500.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (3.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (36.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (8.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (5.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (26.5f) // A #define USER_MOTOR1_SPEED_START_Hz (35.0f) // Hz #define USER_MOTOR1_SPEED_FORCE_Hz (30.0f) // Hz #define USER_MOTOR1_ACCEL_START_Hzps (50.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (200.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Hz #define USER_MOTOR1_BRAKE_CURRENT_A (1.0f) // A #define USER_MOTOR1_BRAKE_TIME_DELAY (12000U) // 60s/5ms // Only for encoder #define USER_MOTOR1_NUM_ENC_SLOTS (1000) // lines #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // lines // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.50f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (1.50f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // Only for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (3.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (5) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration with FAST #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Controller Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //----------------------------------------------------------------------------------------- #elif (USER_MOTOR1 == CHMotor_WM_Test) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (8) #define USER_MOTOR1_Rr_Ohm (0.0f) #define USER_MOTOR1_Rs_Ohm (3.56442809f) #define USER_MOTOR1_Ls_d_H (0.0478876233f) #define USER_MOTOR1_Ls_q_H (0.0478876233f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.377903223f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.0f) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) #define USER_MOTOR1_MAX_CURRENT_A (5.0f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0f) #define USER_MOTOR1_NUM_ENC_SLOTS (2500) #define USER_MOTOR1_INERTIA_Kgm2 (3.100017e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (2.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (4.5f) // A #define USER_MOTOR1_SPEED_START_Hz (30.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Marathon_N56PNRA10102) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (3) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (2.21783066f) #define USER_MOTOR1_Ls_d_H (0.0271135084f) #define USER_MOTOR1_Ls_q_H (0.0271135084f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.575999975f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.5f) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) #define USER_MOTOR1_MAX_CURRENT_A (5.0f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0f) #define USER_MOTOR1_NUM_ENC_SLOTS (2500) #define USER_MOTOR1_INERTIA_Kgm2 (6.300017e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) // V #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (2.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (4.5f) // A #define USER_MOTOR1_SPEED_START_Hz (30.0f) // Hz #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) // Hz #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 1.5f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 2.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 1.0f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 200.0f // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (12000U) // 1min/60s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (12000U) //1min/60s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //------------------------------------------------------------------------------ #elif (USER_MOTOR1 == Tamagawa_TS4606N8302) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.214345068f) #define USER_MOTOR1_Ls_d_H (0.000486983976f) #define USER_MOTOR1_Ls_q_H (0.000486983976f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0441591553f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (2.0f) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) #define USER_MOTOR1_MAX_CURRENT_A (8.5f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (60.0f) #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-06) // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (3.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0f) // Volt #define USER_MOTOR1_RATED_VOLTAGE_V (24.0f) // V #define USER_MOTOR1_FREQ_MIN_Hz (9.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (600.0f) // Hz #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.5f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (3.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (3.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (7.5f) // A #define USER_MOTOR1_SPEED_START_Hz (5.0f) // Hz #define USER_MOTOR1_SPEED_FORCE_Hz (5.0f) // Hz #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Hz #define USER_MOTOR1_BRAKE_CURRENT_A (1.0f) // A #define USER_MOTOR1_BRAKE_TIME_DELAY (12000U) // 60s/5ms // for Rs online calibration with FAST #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Only for encoder #define USER_MOTOR1_NUM_ENC_SLOTS (1000) // lines #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // lines // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.50f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (1.50f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // Only for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (3.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (5) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // Resolver related parameters defines #define USER_M1_PEXC_OFFSET_SET (1574.6f) #define USER_M1_PEXC_SCALE_SF_SET (0.5f / 2048.0f) #define USER_M1_PSIN_OFFSET_SET (1849.927f) #define USER_M1_PCOS_OFFSET_SET (1849.2431f) #define USER_M1_PSIN_SCALE_SF_SET (0.0015059217f) #define USER_M1_PCOS_SCALE_SF_SET (0.0015136319f) // Decouple the main PWM frequency and resolver frequency // Note that the ratio between PWM frequency resolver sampling frequency // have to be integer value #define USER_MOTOR1_RESOLVER_EXCITE_FREQUENCY (10.0f) // 10.0kHz #define USER_MOTOR1_RESOLVER_SAMPLE_FREQUENCY (20.0f) #define USER_MOTOR1_RESOLVER_EXC_PWM_FREQUENCY \ (USER_MOTOR1_RESOLVER_EXCITE_FREQUENCY * 20.0) // 200kHz // Change to SYSTEM_FREQUENCY / 1 after changing EPWM Clock Divide Select to /1 #define USER_MOTOR1_RESOLVER_ADC_PWM_TICKS \ ((USER_SYSTEM_FREQ_MHz / USER_MOTOR1_RESOLVER_SAMPLE_FREQUENCY) * \ 500.0f - 1.0f) #define USER_MOTOR1_RESOLVER_DAC_PWM_TICKS \ ((USER_SYSTEM_FREQ_MHz / USER_MOTOR1_RESOLVER_EXC_PWM_FREQUENCY) * \ 1000.0f - 1.0f) #define USER_MOTOR1_RESOLVER_PLL_OMEGA (200.0f * MATH_TWO_PI) #define USER_MOTOR1_RESOLVER_PLL_ZETA (0.7f) #define USER_MOTOR1_RESOLVER_PLL_COMP_GAIN (-4.6585E-5f) #define USER_MOTOR1_RESOLVER_PLL_LPF_BW (100.0f) // Unit: Hz // Bias between Resolver zero and Id #define USER_MOTOR1_RESOLVER_POS_BIAS (-1.05097198f) // Unit: rad #define USER_MOTOR1_RESOLVER_THETA_BIAS_RAD (-1.05097198f) // Unit: rad #define USER_MOTOR1_RESOLVER_LPF_FC_HZ (100.0f) // Unit: Hz #define USER_MOTOR1_RESOLVER_SCOS_LPF_HZ (5000.0f) // Unit: Hz #define USER_MOTOR1_RESOLVER_CALIB_LPF_HZ (200.0f) // unit: Hz // sin/cos encoder related parameters defines #define USER_M1_PSINAB_OFFSET_SET (1928.65234f) #define USER_M1_PCOSAB_OFFSET_SET (1866.88171f) #define USER_M1_PSINAB_SCALE_SF_SET (0.5f / 2048.0f) #define USER_M1_PCOSAB_SCALE_SF_SET (0.5f / 2048.0f) #define USER_M1_PSINCD_OFFSET_SET (1928.65234f) #define USER_M1_PCOSCD_OFFSET_SET (1866.88171f) #define USER_M1_PSINCD_SCALE_SF_SET (0.5f / 2048.0f) #define USER_M1_PCOSCD_SCALE_SF_SET (0.5f / 2048.0f) #define USER_MOTOR1_PSINCOS_SAMPLE_FREQUENCY (20.0f) #define USER_MOTOR1_PSINCOS_PULSE_LINES (2048.0f) // Change to SYSTEM_FREQUENCY / 1 after changing EPWM Clock Divide Select to /1 #define USER_MOTOR1_PSINCOS_ADC_PWM_TICKS \ ((USER_SYSTEM_FREQ_MHz / USER_MOTOR1_PSINCOS_SAMPLE_FREQUENCY) * \ 500.0f - 1.0f) #define USER_MOTOR1_PSINCOS_PLL_OMEGA (200.0f * MATH_TWO_PI) #define USER_MOTOR1_PSINCOS_PLL_ZETA (0.7f) #define USER_MOTOR1_PSINCOS_PLL_COMP_GAIN (-4.6585E-5f) #define USER_MOTOR1_PSINCOS_PLL_LPF_BW (100.0f) // Unit: Hz // Bias between Resolver zero and Id #define USER_MOTOR1_PSINCOSAB_POS_BIAS (-1.05097198f) // Unit: rad #define USER_MOTOR1_PSINCOSCD_POS_BIAS (-1.05097198f) // Unit: rad #define USER_MOTOR1_PSINCOS_THETA_BIAS_RAD (2.33111715f) // Unit: rad #define USER_MOTOR1_PSINCOS_LPF_FC_HZ (100.0f) // Unit: Hz #define USER_MOTOR1_PSINCOS_SCOS_LPF_HZ (1000.0f) // unit: Hz #define USER_MOTOR1_PSINCOS_CALIB_LPF_HZ (200.0f) // unit: Hz // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //------------------------------------------------------------------------------ #elif (USER_MOTOR1 == AKM21G_CK9NGE00) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (3) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.724585772f) #define USER_MOTOR1_Ls_d_H (0.00115217688f) #define USER_MOTOR1_Ls_q_H (0.00115217688f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.105363153f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (2.0f) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) #define USER_MOTOR1_MAX_CURRENT_A (8.5f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (60.0f) #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-06) // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (3.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0f) // Volt #define USER_MOTOR1_RATED_VOLTAGE_V (24.0f) // V #define USER_MOTOR1_FREQ_MIN_Hz (9.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (600.0f) // Hz #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.5f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (3.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (3.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (7.5f) // A #define USER_MOTOR1_SPEED_START_Hz (5.0f) // Hz #define USER_MOTOR1_SPEED_FORCE_Hz (5.0f) // Hz #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Hz #define USER_MOTOR1_BRAKE_CURRENT_A (1.0f) // A #define USER_MOTOR1_BRAKE_TIME_DELAY (12000U) // 60s/5ms // for Rs online calibration with FAST #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Only for encoder #define USER_MOTOR1_NUM_ENC_SLOTS (1000) // lines #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // lines // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.50f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (1.50f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // Only for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (3.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (5) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // sin/cos encoder related parameters defines #define USER_M1_PSINAB_OFFSET_SET (1928.65234f) #define USER_M1_PCOSAB_OFFSET_SET (1866.88171f) #define USER_M1_PSINAB_SCALE_SF_SET (0.25f / 2048.0f) #define USER_M1_PCOSAB_SCALE_SF_SET (0.25f / 2048.0f) #define USER_M1_PSINCD_OFFSET_SET (1928.65234f) #define USER_M1_PCOSCD_OFFSET_SET (1866.88171f) #define USER_M1_PSINCD_SCALE_SF_SET (0.25f / 2048.0f) #define USER_M1_PCOSCD_SCALE_SF_SET (0.25f / 2048.0f) #define USER_MOTOR1_PSINCOS_SAMPLE_FREQUENCY (20.0f) #define USER_MOTOR1_PSINCOS_PULSE_LINES (2048.0f) #define USER_MOTOR1_PSINCOS_LINES_MAX (USER_MOTOR1_PSINCOS_PULSE_LINES * 4.0f - 1.0f) // Change to SYSTEM_FREQUENCY / 1 after changing EPWM Clock Divide Select to /1 #define USER_MOTOR1_PSINCOS_ADC_PWM_TICKS \ ((USER_SYSTEM_FREQ_MHz / USER_MOTOR1_PSINCOS_SAMPLE_FREQUENCY) * \ 500.0f - 1.0f) #define USER_MOTOR1_PSINCOS_PLL_OMEGA (200.0f * MATH_TWO_PI) #define USER_MOTOR1_PSINCOS_PLL_ZETA (0.7f) #define USER_MOTOR1_PSINCOS_PLL_COMP_GAIN (-4.6585E-5f) #define USER_MOTOR1_PSINCOS_PLL_LPF_BW (100.0f) // Unit: Hz // Bias between Resolver zero and Id #define USER_MOTOR1_PSINCOSAB_POS_BIAS (-1.05097198f) // Unit: rad #define USER_MOTOR1_PSINCOSCD_POS_BIAS (-1.05097198f) // Unit: rad #define USER_MOTOR1_PSINCOS_THETA_BIAS_RAD (2.33111715f) // Unit: rad #define USER_MOTOR1_PSINCOS_LPF_FC_HZ (100.0f) // Unit: Hz #define USER_MOTOR1_PSINCOS_SCOS_LPF_HZ (5000.0f) // unit: Hz #define USER_MOTOR1_PSINCOS_CALIB_LPF_HZ (200.0f) // unit: Hz // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //------------------------------------------------------------------------------ #elif (USER_MOTOR1 == Anaheim_BLY172S_24V) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.399648607f) #define USER_MOTOR1_Ls_d_H (0.000585399743f) #define USER_MOTOR1_Ls_q_H (0.000585399743f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0343291275f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.5f) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.5f) #define USER_MOTOR1_MAX_CURRENT_A (7.5f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0f) #define USER_MOTOR1_NUM_ENC_SLOTS (2000) #define USER_MOTOR1_INERTIA_Kgm2 (4.80185e-06) // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (24.0f) #define USER_MOTOR1_FREQ_MIN_Hz (9.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (600.0f) // Hz #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (2.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (3.5f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (5.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (4.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (9.5f) // A #define USER_MOTOR1_SPEED_START_Hz (20.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (15.0f) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) #define USER_MOTOR1_SPEED_FS_Hz (3.0f) #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.55f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (3.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (5) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration with FAST #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Baldor_BSM90N175) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (0.636681914f) #define USER_MOTOR1_Ls_d_H (0.00240929401f) #define USER_MOTOR1_Ls_q_H (0.00240929401f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.635046303f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.5f) // A - 10~30% of rated current of the motor #define USER_MOTOR1_IND_EST_CURRENT_A (-1.5f) // A - 10~30% of rated current of the motor, just enough to enable rotation #define USER_MOTOR1_MAX_CURRENT_A (9.5f) // A - 30~150% of rated current of the motor #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0f) // Hz - 10~30% of rated frequency of the motor #define USER_MOTOR1_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR1_INERTIA_Kgm2 (6.327e-4) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (10.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (3.0f) // #define USER_MOTOR1_STARTUP_CURRENT_A (5.0f) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (9.5f) // #define USER_MOTOR1_SPEED_START_Hz (10.0f) // #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) // #define USER_MOTOR1_ACCEL_START_Hzps (5.0f) // #define USER_MOTOR1_ACCEL_MAX_Hzps (10.0f) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == QXA_A091ZE190A) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (3) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (0.771440625f) #define USER_MOTOR1_Ls_d_H (0.0132690407f) #define USER_MOTOR1_Ls_q_H (0.0132690407f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.50693661f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (2.5f) #define USER_MOTOR1_IND_EST_CURRENT_A (-2.0f) #define USER_MOTOR1_MAX_CURRENT_A (8.0f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0f) #define USER_MOTOR1_NUM_ENC_SLOTS (2500.0f) #define USER_MOTOR1_INERTIA_Kgm2 (3.100017e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (10.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (3.0f) // #define USER_MOTOR1_STARTUP_CURRENT_A (5.0f) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (9.5f) // #define USER_MOTOR1_SPEED_START_Hz (10.0f) // #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) // #define USER_MOTOR1_ACCEL_START_Hzps (5.0f) // #define USER_MOTOR1_ACCEL_MAX_Hzps (10.0f) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == GMCC_KSK89D53U) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (3) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (1.175) #define USER_MOTOR1_Ls_d_H (0.0076) #define USER_MOTOR1_Ls_q_H (0.0109) #define USER_MOTOR1_RATED_FLUX_VpHz (0.5415546) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (3.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.0) #define USER_MOTOR1_MAX_CURRENT_A (8.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR1_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR1_INERTIA_Kgm2 (0.00018) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (10.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (3.0f) // #define USER_MOTOR1_STARTUP_CURRENT_A (5.0f) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (9.5f) // #define USER_MOTOR1_SPEED_START_Hz (10.0f) // #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) // #define USER_MOTOR1_ACCEL_START_Hzps (5.0f) // #define USER_MOTOR1_ACCEL_MAX_Hzps (10.0f) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 //------------------------------------------------------------------------------ #elif (USER_MOTOR1 == Drone_BLK2BLADE) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (6) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.0614009798f) #define USER_MOTOR1_Ls_d_H (1.29998243e-05f) #define USER_MOTOR1_Ls_q_H (1.29998243e-05f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.00359785813f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (4.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.0) //! \brief Defines the maximum current at the AD converter // Gain = 12, Rin=2.49k, Rdac=27.4k #define USER_MOTOR1_MAX_CURRENT_A (20.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (120.0) #define USER_MOTOR1_NUM_ENC_SLOTS (1000) #define USER_MOTOR1_INERTIA_Kgm2 (3.06154e-04) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (24.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (2000.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (2.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (2.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (3.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (2.0) // A //! \brief Defines the maximum current at the AD converter // Gain = 12, Rin=2.49k, Rdac=27.4k #define USER_MOTOR1_OVER_CURRENT_A (22.25) // #define USER_MOTOR1_SPEED_START_Hz (20.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.55f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Drone_DJI920KV) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (7) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.115332372f) #define USER_MOTOR1_Ls_d_H (1.76480826e-05f) #define USER_MOTOR1_Ls_q_H (1.76480826e-05f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.00605002558f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (3.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-2.5) #define USER_MOTOR1_MAX_CURRENT_A (20.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (120.0) #define USER_MOTOR1_NUM_ENC_SLOTS (1000) // N/A #define USER_MOTOR1_INERTIA_Kgm2 (5.06154e-06) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (12.0) #define USER_MOTOR1_FREQ_MIN_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (2000.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (1200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (3.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (12.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (3.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (2.0) // A #define USER_MOTOR1_OVER_CURRENT_A (16.5) // #define USER_MOTOR1_SPEED_START_Hz (20.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) #define USER_MOTOR1_ACCEL_MAX_Hzps (100.0f) #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder, no available on this motor #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.55f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Drone_SF_Black) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (7) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.0276225284) #define USER_MOTOR1_Ls_d_H (1.25800107e-05) #define USER_MOTOR1_Ls_q_H (1.25800107e-05) #define USER_MOTOR1_RATED_FLUX_VpHz (0.02469966) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (6.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.0) #define USER_MOTOR1_MAX_CURRENT_A (25.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (80.0) #define USER_MOTOR1_NUM_ENC_SLOTS (1000) #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-05) #define USER_MOTOR1_RATED_VOLTAGE_V (24.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (2000.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (2.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0) // Volt #define USER_MOTOR1_STARTUP_CURRENT_A (3.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (2.0) // A #define USER_MOTOR1_OVER_CURRENT_A (25.0) // #define USER_MOTOR1_SPEED_START_Hz (20.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) #define USER_MOTOR1_ACCEL_MAX_Hzps (100.0f) #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == AirFan_MFA0500_24V) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.150690928) #define USER_MOTOR1_Ls_d_H (2.34591134e-05) #define USER_MOTOR1_Ls_q_H (2.34591134e-05) #define USER_MOTOR1_RATED_FLUX_VpHz (0.00798716862f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (4.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.0) #define USER_MOTOR1_MAX_CURRENT_A (16.5) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (200.0) #define USER_MOTOR1_NUM_ENC_SLOTS (1000) #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-05) // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (24.0) #define USER_MOTOR1_FREQ_MIN_Hz (9.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (1500.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (1000.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (2.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (14.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (2.5) // A #define USER_MOTOR1_STARTUP_CURRENT_A (4.5) // A #define USER_MOTOR1_TORQUE_CURRENT_A (2.0) // A #define USER_MOTOR1_OVER_CURRENT_A (16.5) // A #define USER_MOTOR1_SPEED_START_Hz (120.0) #define USER_MOTOR1_SPEED_FORCE_Hz (100.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0) #define USER_MOTOR1_SPEED_FS_Hz (3.0) // only for encoder, N/A #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.25f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (5.00f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.25f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-NBLDC #define USER_MOTOR1_RAMP_START_Hz (5.0) #define USER_MOTOR1_RAMP_END_Hz (30.0) #define USER_MOTOR1_RAMP_DELAY (1) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Nedic_EPSMS037_D12V) #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (0.0412785485) #define USER_MOTOR1_Ls_d_H (0.000121561985) #define USER_MOTOR1_Ls_q_H (0.000121561985) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0572981499) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (5.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-4.0) #define USER_MOTOR1_MAX_CURRENT_A (12.5) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR1_NUM_ENC_SLOTS (1000.0) #define USER_MOTOR1_INERTIA_Kgm2 (0.015) #define USER_MOTOR1_RATED_VOLTAGE_V (12.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (1500.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (1000.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (2.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (12.0) // Volt #define USER_MOTOR1_STARTUP_CURRENT_A (2.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.5) // A #define USER_MOTOR1_OVER_CURRENT_A (12.5) // #define USER_MOTOR1_SPEED_START_Hz (10.0) // #define USER_MOTOR1_SPEED_FORCE_Hz (20.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) // #define USER_MOTOR1_ACCEL_MAX_Hzps (100.0) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == ziehlab_Fan160hv) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (24.0002041) #define USER_MOTOR1_Ls_d_H (0.125637174) #define USER_MOTOR1_Ls_q_H (0.125637174) #define USER_MOTOR1_RATED_FLUX_VpHz (1.42636561) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.25) #define USER_MOTOR1_IND_EST_CURRENT_A (-0.5) #define USER_MOTOR1_MAX_CURRENT_A (3.75) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (15.0) #define USER_MOTOR1_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR1_INERTIA_Kgm2 (27.5e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.0) // A #define USER_MOTOR1_ALIGN_CURRENT_A (0.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (2.0) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.5) // A #define USER_MOTOR1_OVER_CURRENT_A (3.0) // A #define USER_MOTOR1_SPEED_START_Hz (20.0) // #define USER_MOTOR1_SPEED_FORCE_Hz (30.0) // #define USER_MOTOR1_ACCEL_START_Hzps (10.0) // #define USER_MOTOR1_ACCEL_MAX_Hzps (10.0) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.55f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == embpast_Fan160hv) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (8.76899433) #define USER_MOTOR1_Ls_d_H (0.0284830406) #define USER_MOTOR1_Ls_q_H (0.0284830406) #define USER_MOTOR1_RATED_FLUX_VpHz (0.280854076) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.25) #define USER_MOTOR1_IND_EST_CURRENT_A (-0.30) #define USER_MOTOR1_MAX_CURRENT_A (3.5) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR1_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR1_INERTIA_Kgm2 (27.5e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.0) // A #define USER_MOTOR1_ALIGN_CURRENT_A (0.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (2.0) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.0) // A #define USER_MOTOR1_OVER_CURRENT_A (6.25) // A #define USER_MOTOR1_SPEED_START_Hz (20.0) // #define USER_MOTOR1_SPEED_FORCE_Hz (30.0) // #define USER_MOTOR1_ACCEL_START_Hzps (10.0) // #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.55f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Anaheim_BLWS235D) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (5.44400978) #define USER_MOTOR1_Ls_d_H (0.0224932302) #define USER_MOTOR1_Ls_q_H (0.0224932302) #define USER_MOTOR1_RATED_FLUX_VpHz (0.560590863) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR1_MAX_CURRENT_A (2.5) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR1_INERTIA_Kgm2 (0.0000230206204) // 0.003261 oz-in-sec2 #define USER_MOTOR1_RATED_VOLTAGE_V (160.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (200.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (160.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (1.5) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.0) // A #define USER_MOTOR1_OVER_CURRENT_A (2.0) // #define USER_MOTOR1_SPEED_START_Hz (30.0) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) // #define USER_MOTOR1_ACCEL_MAX_Hzps (100.0) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) #if defined(MOTOR1_FAST) // Only for FAST #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base #endif // MOTOR1_FAST #if defined(MOTOR1_ESMO) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f #endif // MOTOR1_ESMO #if defined(MOTOR1_ENC) // Only for encoder #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // lines #endif // MOTOR1_ENC #if defined(MOTOR1_HALL) // Only for hall sensor #define USER_MOTOR1_HALL_DELTA_rad (MATH_TWO_PI / 36.0f) // rad #endif // MOTOR1_HALL #if defined(MOTOR1_ISBLDC) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) #endif // MOTOR1_ISBLDC // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Anaheim_BLZ362S) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.562865257f) #define USER_MOTOR1_Ls_d_H (0.00117779721f) #define USER_MOTOR1_Ls_q_H (0.00117779721f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.276417136f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (2.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.5) #define USER_MOTOR1_MAX_CURRENT_A (7.5) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_INERTIA_Kgm2 (0.0000230206204) // 0.003261 oz-in-sec2 #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (160.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (200.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (160.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (2.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (4.5) // #define USER_MOTOR1_TORQUE_CURRENT_A (0.5) // A #define USER_MOTOR1_OVER_CURRENT_A (6.5) // #define USER_MOTOR1_SPEED_START_Hz (30.0) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) // #define USER_MOTOR1_ACCEL_MAX_Hzps (100.0) // #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.50f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.75f) #define USER_MOTOR1_PLL_KP_MAX (10.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Regal_Beloit_5SME39DL0756) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (3) #define USER_MOTOR1_Rr_Ohm (0.0) #define USER_MOTOR1_Rs_Ohm (4.581007) #define USER_MOTOR1_Ls_d_H (0.03727356) #define USER_MOTOR1_Ls_q_H (0.03727356) #define USER_MOTOR1_RATED_FLUX_VpHz (0.6589699) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR1_MAX_CURRENT_A (2.6) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Drone9616_110KV_48V) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (7) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.0282184016) #define USER_MOTOR1_Ls_d_H (1.39398744e-05) #define USER_MOTOR1_Ls_q_H (1.39398744e-05) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0159354247) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (3.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.0) #define USER_MOTOR1_MAX_CURRENT_A (50.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (60.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_INERTIA_Kgm2 (4.80185e-06) // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (48.0) #define USER_MOTOR1_FREQ_MIN_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (1200.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (2.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (48.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.5) // #define USER_MOTOR1_STARTUP_CURRENT_A (5.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (2.0) // A #define USER_MOTOR1_OVER_CURRENT_A (75.0) // #define USER_MOTOR1_SPEED_START_Hz (75.0) #define USER_MOTOR1_SPEED_FORCE_Hz (60.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) #define USER_MOTOR1_ACCEL_MAX_Hzps (50.0) #define USER_MOTOR1_SPEED_FS_Hz (3.0) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (1.00f) // 2.0f #define USER_MOTOR1_KSLIDE_MIN (0.05f) #define USER_MOTOR1_PLL_KP_MAX (15.0f) #define USER_MOTOR1_PLL_KP_MIN (2.0f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.05f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) // 1.0f #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) // 2.5f #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // 100.0f // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Anaheim_BLY341S_48V) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.463800967) #define USER_MOTOR1_Ls_d_H (0.00114538975) #define USER_MOTOR1_Ls_q_H (0.00114538975) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0978558362) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (2.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-2.0) #define USER_MOTOR1_MAX_CURRENT_A (20.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (300.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0) // Volt #elif (USER_MOTOR1 == Anaheim_BLY341S_Y24V) #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.133211181) #define USER_MOTOR1_Ls_d_H (0.000275031634) #define USER_MOTOR1_Ls_q_H (0.000275031634) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0514687076) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (4.5) #define USER_MOTOR1_IND_EST_CURRENT_A (-4.0) #define USER_MOTOR1_MAX_CURRENT_A (12.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_INERTIA_Kgm2 (3.99683e-05) // 0.00566 oz-in-sec2 #define USER_MOTOR1_RATED_VOLTAGE_V (24.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (300.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0) // Volt #define USER_MOTOR1_STARTUP_CURRENT_A (3.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.5) // A #define USER_MOTOR1_OVER_CURRENT_A (6.0) // #define USER_MOTOR1_SPEED_START_Hz (10.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0) // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == Anaheim_BLY341S_D24V) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (4) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.0544644073) #define USER_MOTOR1_Ls_d_H (9.58044038e-05) #define USER_MOTOR1_Ls_q_H (9.58044038e-05) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0544644073) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (4.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-3.5) #define USER_MOTOR1_MAX_CURRENT_A (8.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_INERTIA_Kgm2 (3.99683e-05) // 0.00566 oz-in-sec2 #define USER_MOTOR1_RATED_VOLTAGE_V (24.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (300.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (4.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0) // Volt #define USER_MOTOR1_STARTUP_CURRENT_A (3.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (1.5) // A #define USER_MOTOR1_OVER_CURRENT_A (8.5) // #define USER_MOTOR1_SPEED_START_Hz (10.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0) // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == EMSYNERGY_LVACI) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (1.05) #define USER_MOTOR1_Rs_Ohm (1.79) #define USER_MOTOR1_Ls_d_H (0.00681) #define USER_MOTOR1_Ls_q_H (0.00681) #define USER_MOTOR1_RATED_FLUX_VpHz (0.8165f*14.7f*1.4142f/50.0f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (0.91f*1.4142f) #define USER_MOTOR1_RES_EST_CURRENT_A (0.5f) #define USER_MOTOR1_IND_EST_CURRENT_A (NULL) #define USER_MOTOR1_MAX_CURRENT_A (2.50) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (10.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-06) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (24.0) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.5f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (1.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (5.0) // A #define USER_MOTOR1_SPEED_START_Hz (30.0) #define USER_MOTOR1_SPEED_FORCE_Hz (25.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0) #define USER_MOTOR1_SPEED_FS_Hz (3.0) // only for encoder, N/A #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO, N/A #define USER_MOTOR1_KSLIDE_MAX (1.50f) #define USER_MOTOR1_KSLIDE_MIN (0.15f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.25f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (2.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC, N/A #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base #elif (USER_MOTOR1 == Marathon_5K33GN2A) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (5.508003) #define USER_MOTOR1_Rs_Ohm (10.71121) #define USER_MOTOR1_Ls_d_H (0.05296588) #define USER_MOTOR1_Ls_q_H (0.05296588) #define USER_MOTOR1_RATED_FLUX_VpHz (0.8165*220.0/60.0) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (1.378) #define USER_MOTOR1_RES_EST_CURRENT_A (1.0) #define USER_MOTOR1_IND_EST_CURRENT_A (NULL) #define USER_MOTOR1_MAX_CURRENT_A (3.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (5.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0) // Volt #elif (USER_MOTOR1 == Marathon_56H17T2011A) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (5.159403) #define USER_MOTOR1_Rs_Ohm (7.924815) #define USER_MOTOR1_Ls_d_H (0.03904648) #define USER_MOTOR1_Ls_q_H (0.03904648) #define USER_MOTOR1_RATED_FLUX_VpHz (0.8*0.8165*230.0/60.0) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (0.9941965) #define USER_MOTOR1_RES_EST_CURRENT_A (0.5) #define USER_MOTOR1_IND_EST_CURRENT_A (NULL) #define USER_MOTOR1_MAX_CURRENT_A (2.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (5.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) #define USER_MOTOR1_INERTIA_Kgm2 (6.300017e-5) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (200.0f) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0f) // Hz #define USER_MOTOR1_FREQ_MIN_Hz (5.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (400.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (200.0) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (2.5f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (1.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (4.5f) // A #define USER_MOTOR1_SPEED_START_Hz (30.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0f) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) // Hz/s #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) // Hz/s #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) #elif (USER_MOTOR1 == Dayton_3N352C) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (2.428799) #define USER_MOTOR1_Rs_Ohm (2.863202) #define USER_MOTOR1_Ls_d_H (0.02391323) #define USER_MOTOR1_Ls_q_H (0.02391323) #define USER_MOTOR1_RATED_FLUX_VpHz (0.8165*230.0/60.0) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (1.0) #define USER_MOTOR1_IND_EST_CURRENT_A (NULL) #define USER_MOTOR1_MAX_CURRENT_A (3.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (5.0) #define USER_MOTOR1_NUM_ENC_SLOTS (NULL) //------------------------------------------------------------------ #elif (USER_MOTOR1 == my_pm_motor_1) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (3) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.007) #define USER_MOTOR1_Ls_d_H (0.000021) #define USER_MOTOR1_Ls_q_H (0.000021) #define USER_MOTOR1_RATED_FLUX_VpHz (0.0270898938) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (10.0f) //電機額定電流的10%~30%(A) #define USER_MOTOR1_IND_EST_CURRENT_A (-10.0f) //電機額定電流的10%~30%, 剛好能驅動(A) #define USER_MOTOR1_MAX_CURRENT_A (150.0f) //電機最大電流, 額定電流的50%~150%(A) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (40.0f) //電機額定轉速的10%~30%(Hz) #define DC_LINK_LIMIT (150.0f) //總電流限制 // Number of lines on the motor's quadrature encoder #define USER_MOTOR1_NUM_ENC_SLOTS (1000) #define USER_MOTOR1_INERTIA_Kgm2 (0.00014) //轉子轉動慣量, 1.4Kgcm2=0.00014Kgm2 // Ls compensation coefficient #define USER_MOTOR1_Ls_d_COMP_COEF (0.15f) // 0.0f~0.5f #define USER_MOTOR1_Ls_q_COMP_COEF (0.35f) // 0.0f~0.5f #define USER_MOTOR1_Ls_MIN_NUM_COEF (0.55f) // 0.5f~1.0f #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (12.0f) #define USER_MOTOR1_FREQ_MIN_Hz (9.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (250.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (1.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0f) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05f) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01f) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5f) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.5f) // A #define USER_MOTOR1_STARTUP_CURRENT_A (10.0f) // A #define USER_MOTOR1_TORQUE_CURRENT_A (2.0f) // A #define USER_MOTOR1_OVER_CURRENT_A (180.0f) // A #define USER_MOTOR1_BRAKE_CURRENT_A (1.0f) // A #define USER_MOTOR1_BRAKE_TIME_DELAY (12000U) // 60s/5ms #define USER_MOTOR1_SPEED_START_Hz (30.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (25.0f) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f) #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.75f) // #define USER_MOTOR1_KSLIDE_MIN (0.15f) #define USER_MOTOR1_PLL_KP_MAX (6.75f) // #define USER_MOTOR1_PLL_KP_MIN (0.75f) #define USER_MOTOR1_PLL_KP_SF (5.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_Hz (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (3.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (5) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #elif (USER_MOTOR1 == my_aci_motor_2) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_INDUCTION #define USER_MOTOR1_NUM_POLE_PAIRS (2) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (NULL) #define USER_MOTOR1_Ls_d_H (NULL) #define USER_MOTOR1_Ls_q_H (NULL) #define USER_MOTOR1_RATED_FLUX_VpHz (0.8165f * 230.0f / 60.0f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (0.5f) #define USER_MOTOR1_IND_EST_CURRENT_A (NULL) #define USER_MOTOR1_MAX_CURRENT_A (5.0f) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (5.0f) // Number of lines on the motor's quadrature encoder #define USER_MOTOR1_NUM_ENC_SLOTS (1000) #define USER_MOTOR1_FREQ_MIN_Hz (5.0f) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (300.0f) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0f) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (400.0f) // Hz #define USER_MOTOR1_VOLT_MIN_V (4.0f) // Volt #define USER_MOTOR1_VOLT_MAX_V (24.0f) // Volt // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0 #else #error No motor type specified #endif //! \brief Defines the maximum current slope for Id trajectory //! #define USER_M1_MAX_CURRENT_DELTA_A (USER_MOTOR1_RES_EST_CURRENT_A / USER_M1_ISR_FREQ_Hz) //! \brief Defines the maximum current slope for Id trajectory during power warp mode //! #define USER_M1_MAX_CURRENT_DELTA_PW_A (0.3 * USER_MOTOR1_RES_EST_CURRENT_A / USER_M1_ISR_FREQ_Hz) #ifndef USER_MOTOR1 #error Motor type is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_TYPE #error The motor type is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_NUM_POLE_PAIRS #error Number of motor pole pairs is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_Rr_Ohm #error The rotor resistance is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_Rs_Ohm #error The stator resistance is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_Ls_d_H #error The direct stator inductance is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_Ls_q_H #error The quadrature stator inductance is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_RATED_FLUX_VpHz #error The rated flux of motor is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_MAGNETIZING_CURRENT_A #error The magnetizing current is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_RES_EST_CURRENT_A #error The resistance estimation current is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_IND_EST_CURRENT_A #error The inductance estimation current is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_MAX_CURRENT_A #error The maximum current is not defined in user_mtr1.h #endif #ifndef USER_MOTOR1_FLUX_EXC_FREQ_Hz #error The flux excitation frequency is not defined in user_mtr1.h #endif #if ((USER_M1_NUM_CURRENT_SENSORS < 2) || (USER_M1_NUM_CURRENT_SENSORS > 3)) #error The number of current sensors must be 2 or 3 #endif #if (USER_M1_NUM_VOLTAGE_SENSORS != 3) #error The number of voltage sensors must be 3 #endif // ************************************************************************** // the Defines //! \brief Defines the minimum ADC value for pot #define USER_M1_POT_ADC_MIN (200U) // 0 < the value < 4096 //! \brief Defines the maximum ADC value for pot #define USER_M1_POT_ADC_MAX (4096U - 200U) // 0 < the value < 4096 //! \brief Defines the speed conversion coefficient for pot #define USER_M1_POT_SPEED_SF USER_MOTOR1_FREQ_MAX_Hz / ((float32_t)(USER_M1_POT_ADC_MAX - USER_M1_POT_ADC_MIN)) //! \brief Defines the minimum frequency for pot #define USER_M1_POT_SPEED_MIN_Hz (USER_MOTOR1_FREQ_MAX_Hz * 0.1f) //! \brief Defines the maximum frequency for pot #define USER_M1_POT_SPEED_MAX_Hz (USER_MOTOR1_FREQ_MAX_Hz * 0.5f) //! \brief Defines the pot signal wait delay time #define USER_M1_WAIT_TIME_SET (500U) // 0.5s/1ms //! \brief Defines the minimum frequency for pulse input #define USER_M1_SPEED_CAP_MIN_Hz (15.0f) //! \brief Defines the maximum frequency for pulse input #define USER_M1_SPEED_CAP_MAX_Hz (600.0f) //! \brief Defines the pulse capture wait delay time #define USER_M1_CAP_WAIT_TIME_SET (200U) // 0.2s/1ms //! \brief Defines the switch signal wait delay time #define USER_M1_SWITCH_WAIT_TIME_SET (50U) // 0.05s/1ms // ************************************************************************** // the typedefs // ************************************************************************** // the globals extern USER_Params userParams_M1; #if defined(BSXL8323RS_REVA) || defined(BSXL8353RS_REVA) || \ defined(BSXL8316RT_REVA) // Watch window interface to the drv8323/drv8353/DRV8316 SPI extern DRVIC_VARS_t drvicVars_M1; #endif // BSXL8323RS_REVA | BSXL8353RS_REVA | BSXL8316RT_REVA // ************************************************************************** // the functions //! \param[in] pUserParams The pointer to the user param structure extern void USER_setMotor1Params(userParams_Handle handle); //***************************************************************************** // // Close the Doxygen group. //! @} // //***************************************************************************** //***************************************************************************** // // Mark the end of the C bindings section for C++ compilers. // //***************************************************************************** #ifdef __cplusplus } #endif #endif // end of USER_MTR1_H definition
谢谢。此致、
切里
您好、Cherry:
换向控制算法将受到 CSA 中读取的数据的影响。 您是否具有 CSA 引脚输入电压图像? 为了更好地降低电流检测信号中的噪声、您需要考虑滤波(在 CSA 的输入端和输出端)和物理板布局(按照本应用手册 https://www.ti.com/lit/an/slvaf66/slvaf66.pdf 中的建议 和我之前发送的最佳实践手册)。 换向算法的实际代码也许很好。
此致!
戴维斯
嗨、Davis:
稍后将分享该波形、因为控制器有问题。
下面是驱动板的 PCB 布局、您能否帮助检查是否有任何需要调整的地方?
/cfs-file/__key/communityserver-discussions-components-files/138/pcb-layout.rar
谢谢。此致、
切里
您好、Cherry:
请参阅我们的最佳布局实践应用手册: https://www.ti.com/lit/an/slva959b/slva959b.pdf?ts=1686935027388。此外、 本常见问题解答的第11节还介绍了有关布局审查的一些要点: https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1176539/faq-quick-guide-to-debugging-common-issues-in-bldc-motor-drivers。如果这些资源能提供帮助、请告诉我。
此致!
戴维斯