请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316AEVM 您好!
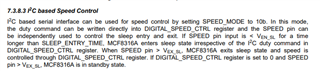
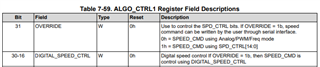
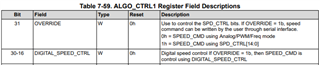
目前我正在尝试通过具有主机 MCU 的 I2C 来控制 MCF 电机驱动器控制器。 我浏览了 MCF 的数据表、他们说、可以通过将值写入 algo_CTRL1的 DIGITAL_SPEED_CTRL 位来控制电机转速。 如果我对通过 DIGITAL_SPEED_CTRL 位控制速度的理解不正确、您能否建议我控制速度的正确方法。
问题。 如何计算 DIGITAL_SPEED_CTRL 位的值