请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
您好!
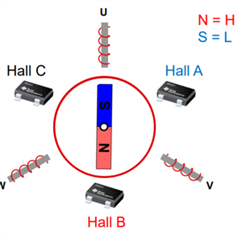
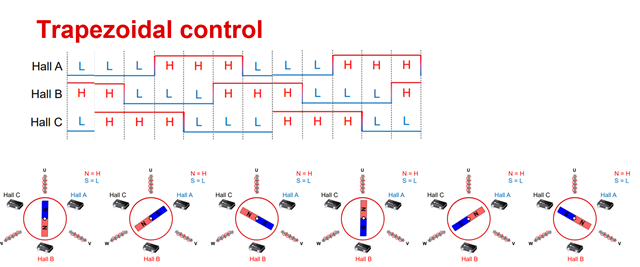
这个问题与 BLDC 梯形换向有关。
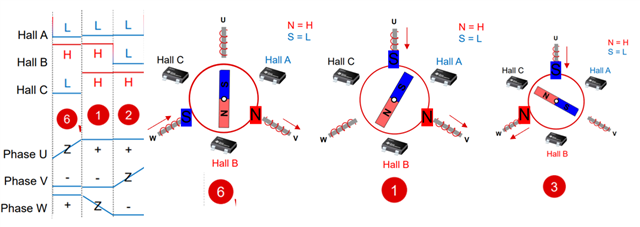
我们都知道、每个霍尔传感器在梯形换向中每180°改变一次输出、因此对于霍尔传感器和转子、霍尔传感器的输出将在转子的磁极运动的哪个点发生变化?
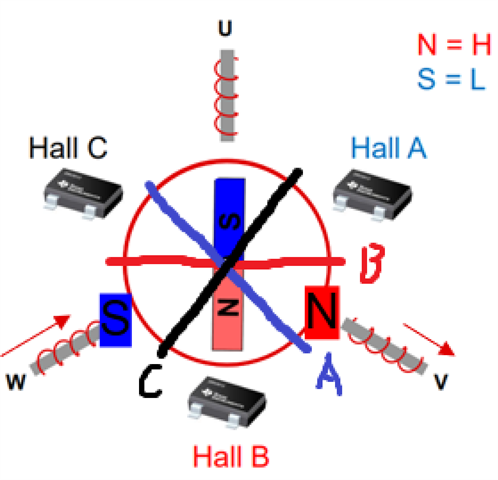
例如、在下图的左下角、为什么当转子的 N 极与电机的 U 相对齐时、霍尔传感器开始输出 L? 是不是因为霍尔传感器的感应范围为120°、当 N 和 U 对齐时、它会进入霍尔传感器的感应范围? 或者、此时转子磁场强度是否已达到传感器输出变化的阈值? 如果后者具有不同场强的永磁体不会导致转子在不同位置改变传感器输出?
这个问题让我感到困惑、希望你能帮我解决。
非常感谢。