请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 专家、您好!
1. 在高输入电压(13.5V)和低开关步进频率(635Hz)下 IO 波形可以。

2.将输入电压降低到9V、步进频率保持在635Hz,波形保持正常

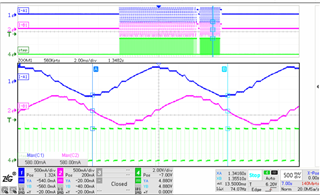
3. 但是9V 和快速步进频率(1.18KHz)有一些问题、对功能有什么影响?
Vin x Ton 似乎必须足以确保电感电 流上升/下降导通时间、并且确保阶跃移动、但我们如何定义 SOA?