请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
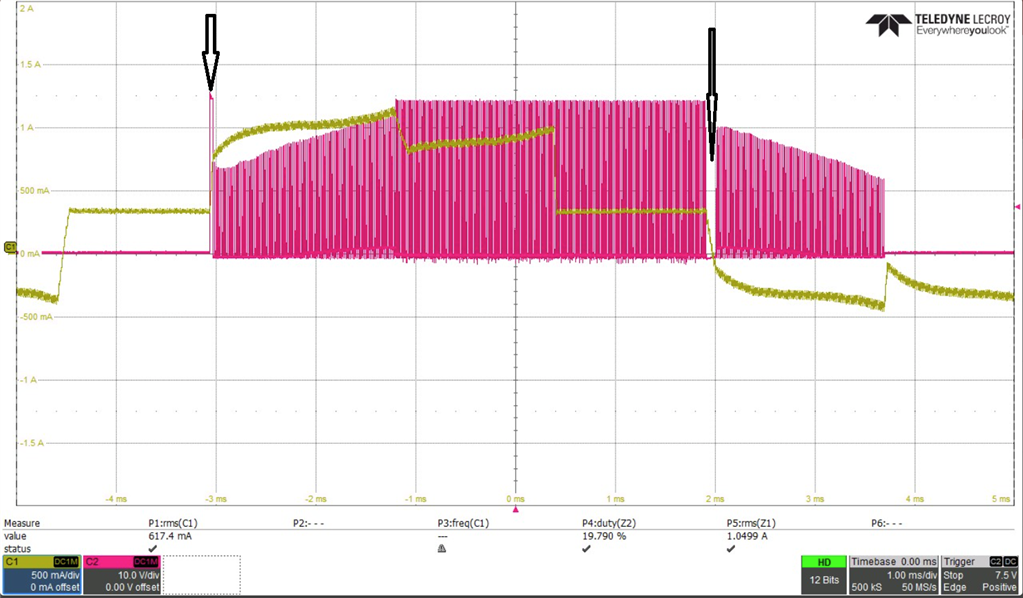
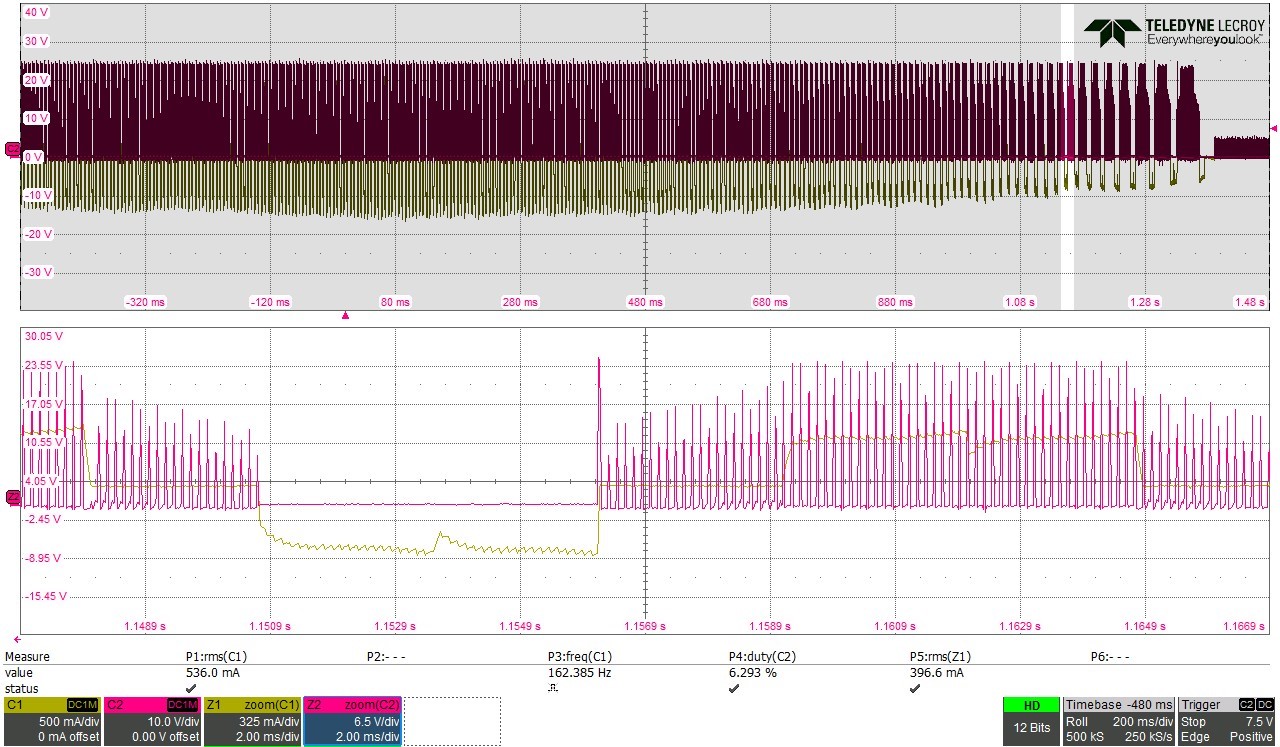
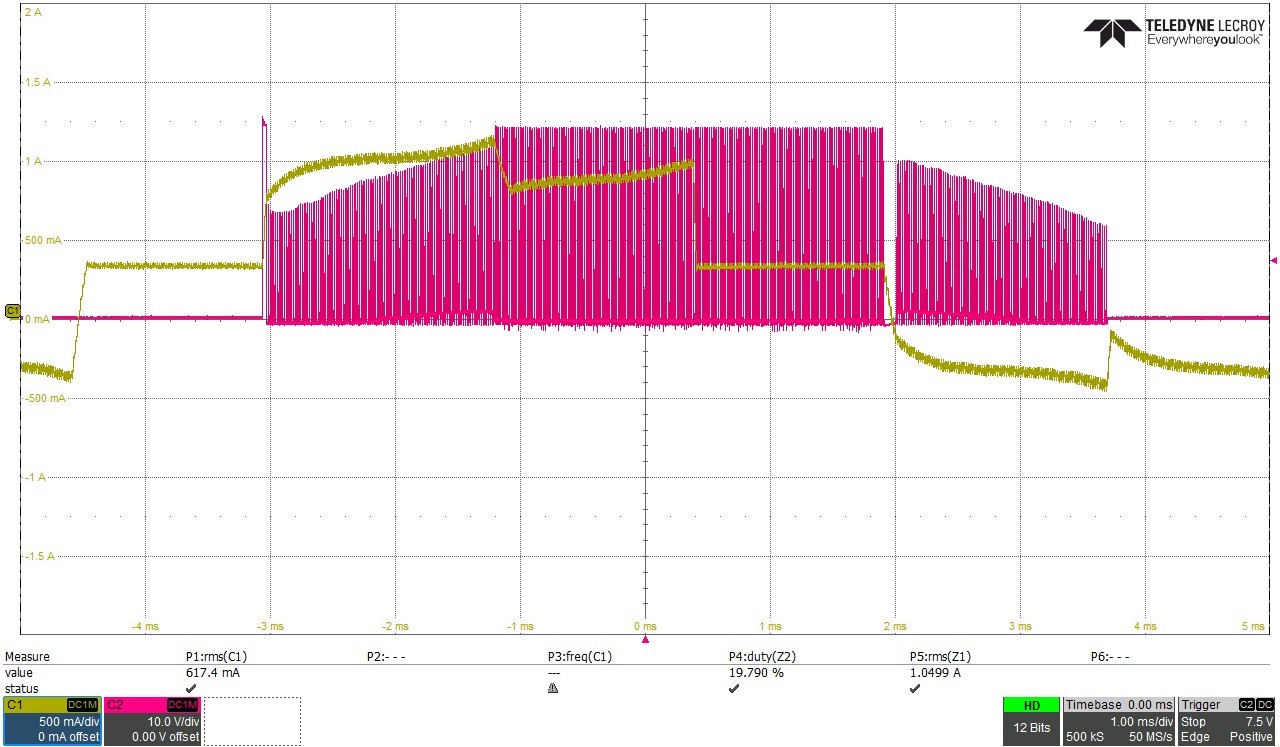
器件型号:MCT8316Z 我注意到、在电机改变相位(梯形相移)时、电机的 PWM 被禁用。
当使用20kHz PWM 时-并不总是发生 II'ts、
在50kHz PWM 周期上、我会一直看到它。
同时、我也在使用直流无刷电机、并尝试了一些用于控制-18/20/50 kHz 的 PWM 频率。
我曾认为频率越快越好。
但运行最平稳的似乎是在18KHz、50 kHz 具有"磨削"效果。
我对这两者使用了纯正弦 PWM、驱动器电流被限制为1A。 因此,在正弦的峰值,我得到电流限制,但最磨削速度较慢.
此外、该电机采用24V 绕组、我们采用32V 工作电压。
附图。
此外,为了平稳操作-我应该在 ASR 和 AAR (主动消磁)中放置什么? 或者它们没有任何效果?
压摆率也是如此?