请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
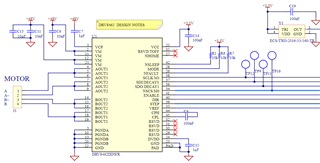
器件型号:DRV8462 我们已将此驱动程序设置为采用 STM Up。 我们注意到、当 TI 的评估板保持相对低温时、它会变得相当热。 要确保我们设置正确、需要关注哪些方面?
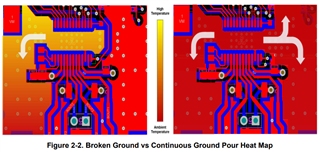
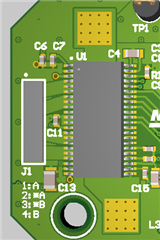
在设计比较(我们的与 TI 评估)中、它们相对相似。 我们很快将对此运行热像仪、以查看热量来自何处。 我很好奇、是否有关于我们固件的此设置以及如何驱动此驱动程序的详细信息。 如果任何人有任何意见或曾经使用过此设备(或一般)、我会非常感激。 我们不明白为什么这是相当热的。 我们甚至为散热焊盘(GND)添加了额外的破孔、使我们的散热器同时应用于器件顶部(带有散热焊盘)、然后应用于外露的方形焊盘(带导热油脂)。
谢谢。