Other Parts Discussed in Thread: DRV8836, TMS320F28035
主题中讨论的其他器件: TMS320F28035
大家好、
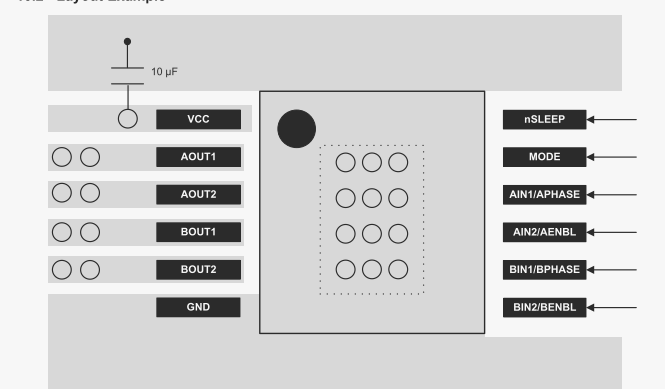
要求:用 DRV8836DSSR 芯片来驱动空心杯电机、但现在有一些问题、如下所示:
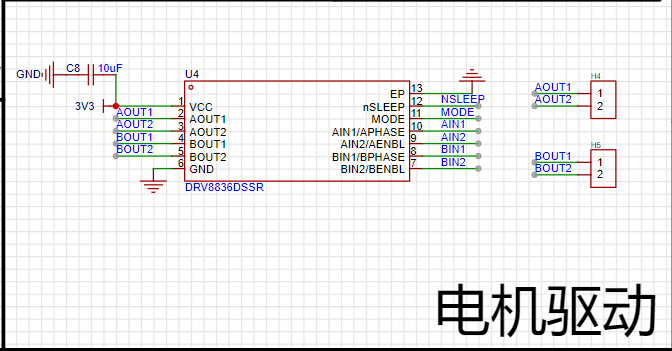
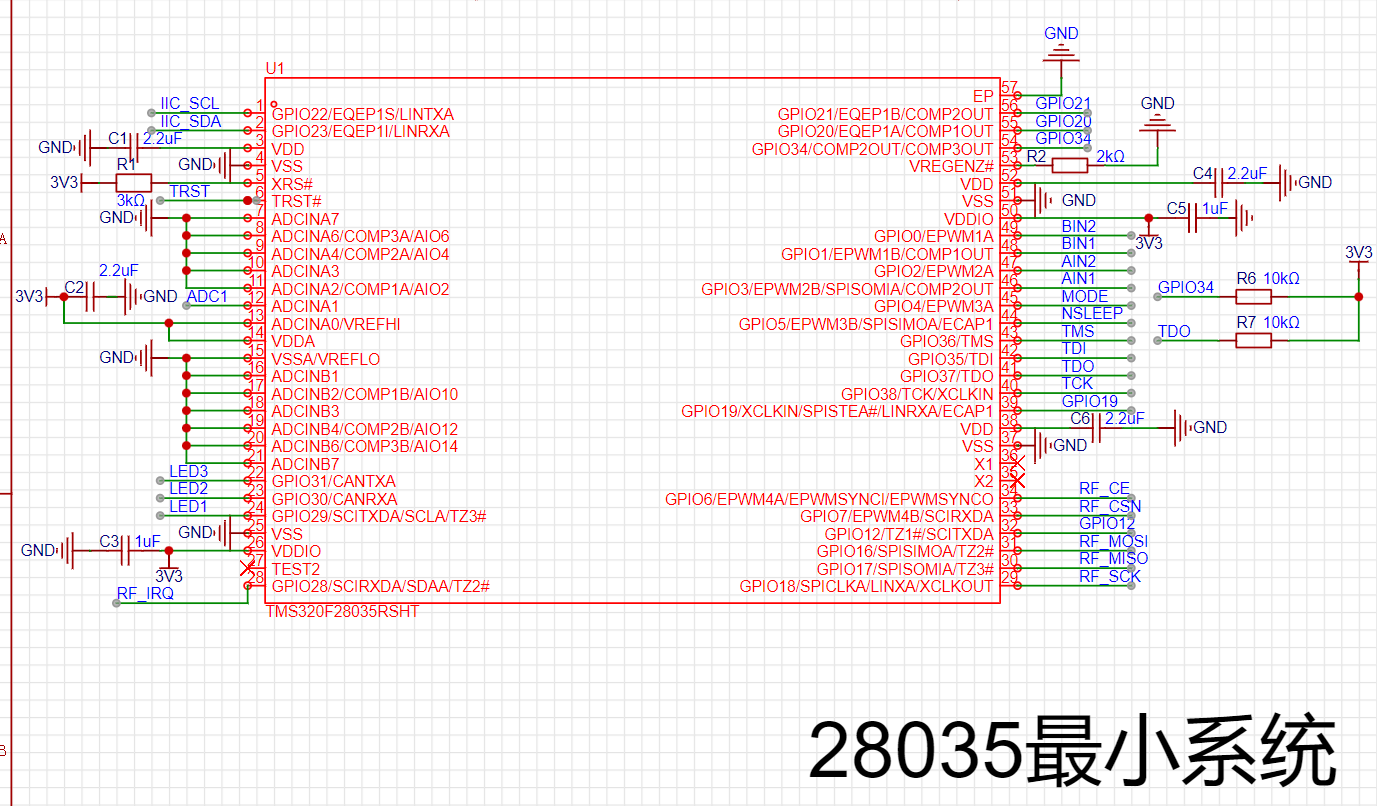
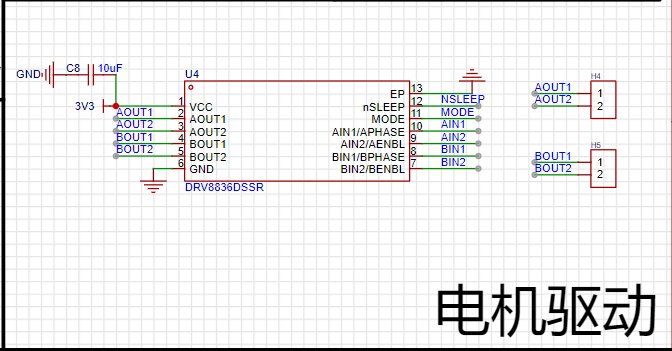
所用的主控制芯片是 TMS320F28035 (56引脚)芯片、主控制芯片和 DRV8836芯片的硬件原理图如下:
从原理图可以清楚地看到主控制芯片和 DRV8836的连接关系。
CCS 使用 EPWM1和 EPWM2调节 DRV8836的完整代码如下:
第一个是 main.c 文件:
#include "Config.h"
extern Uint16 RamfuncsLoadSize;
void main(void)
{
InitSysCtrl();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
memcpy(&RamfuncsRunStart, &RamfuncsLoadStart, (Uint32)&RamfuncsLoadSize);
LED_Init(); // 初始化LED-
InitMotor(); // 初始化电机-
Timer0_init(); // 定时器0初始化,1ms周期中断-
PieCtrlRegs.PIECTRL.bit.ENPIE = 1;
EINT;
ERTM;
while(1)
{
int f=900;
/* 实现的任务1(10ms为一个周期):
* 调控电机油门或转向*/
if(timer0Base.loop100HzCnt >= 10)
{
timer0Base.loop100HzCnt = 0;
LED2_TOGGLE;
DELAY_US(200*1000);
MotorPwmFlash(f,2);
LED3_TOGGLE;
}
}
}
MOTO.c 文件:
#include "stdio.h"
#include "Moto.h"
uint8_t Turningmodeselection=Noturn;
uint16_t MOTO1_PWM=0;
/*******************************************************************************
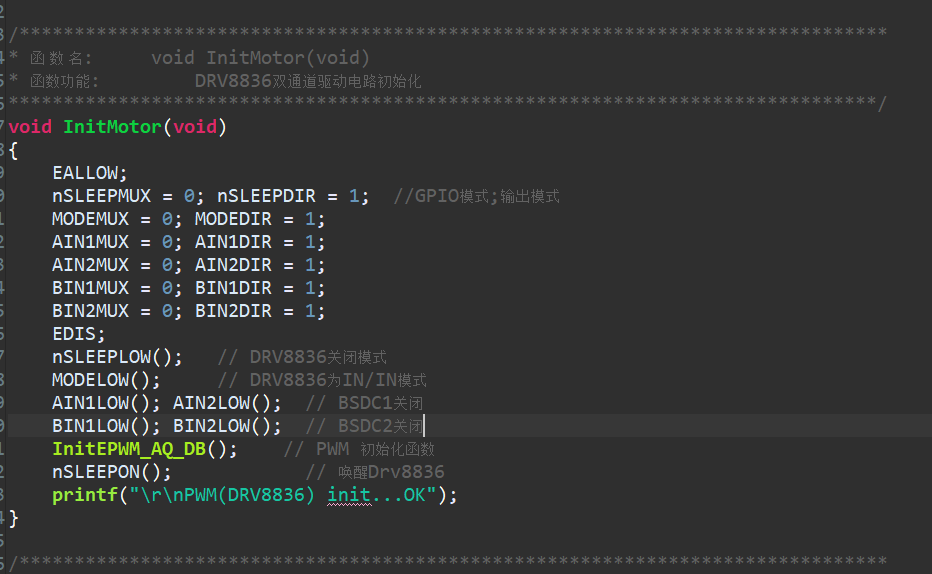
* 函 数 名: void InitMotor(void)
* 函数功能: DRV8836双通道驱动电路初始化
*******************************************************************************/
void InitMotor(void)
{
EALLOW;
nSLEEPMUX = 0; nSLEEPDIR = 1; //GPIO模式;输出模式
MODEMUX = 0; MODEDIR = 1;
AIN1MUX = 0; AIN1DIR = 1;
AIN2MUX = 0; AIN2DIR = 1;
BIN1MUX = 0; BIN1DIR = 1;
BIN2MUX = 0; BIN2DIR = 1;
EDIS;
nSLEEPLOW(); // DRV8836关闭模式
MODELOW(); // DRV8836为IN/IN模式
AIN1LOW(); AIN2LOW(); // BSDC1关闭
BIN1LOW(); BIN2LOW(); // BSDC2关闭
InitEPWM_AQ_DB(); // PWM 初始化函数
nSLEEPON(); // 唤醒Drv8836
printf("\r\nPWM(DRV8836) init...OK");
}
/*******************************************************************************
* 函 数 名: void InitEPWM_AQ_DB(void)
* 函数功能: PWM1/2初始化
*******************************************************************************/
void InitEPWM_AQ_DB(void)
{
char i;
volatile struct EPWM_REGS *PWMDef[] = {&EPwm1Regs,&EPwm1Regs,&EPwm2Regs,&EPwm3Regs,&EPwm4Regs,&EPwm5Regs,&EPwm6Regs};
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC =0; //失能时基模块时钟
SysCtrlRegs.PCLKCR1.bit.EPWM1ENCLK =1; //时钟启用
SysCtrlRegs.PCLKCR1.bit.EPWM2ENCLK =1; //时钟启用
EDIS;
InitEPwmGpio(); //开启时钟及初始化配置
EALLOW;
PieVectTable.EPWM1_INT = &epwm1_isr;
PieVectTable.EPWM2_INT = &epwm2_isr;
EDIS;
for(i=1;i<4;i++)
{
EALLOW;
PWMDef[i]->TBCTL.bit.CTRMODE = TB_COUNT_UP; // 递增计数模式
PWMDef[i]->TBPRD = EPWM_TIMER_TBPRD; // 设置定时器周期
PWMDef[i]->TBCTL.bit.PHSEN = TB_DISABLE; // 禁止相位加载
PWMDef[i]->TBPHS.half.TBPHS = 0x0000; // 时基相位寄存器的值赋值0
PWMDef[i]->TBCTR = 0x0000; // 时基计数器清零,时基计数器为16 位, 读该寄存器的值可以得到时基计数器 (TBCTR) 的值。 写该寄存器可以设置时基计数器的值。
PWMDef[i]->TBCTL.bit.HSPCLKDIV = HTB_DIV1; // SYSCLKOUT=60M HZ
PWMDef[i]->TBCTL.bit.CLKDIV = TB_DIV64; // 设置时基时钟速率
PWMDef[i]->CMPCTL.bit.SHDWAMODE = CC_SHADOW; //设置影子
PWMDef[i]->CMPCTL.bit.SHDWBMODE = CC_SHADOW;
PWMDef[i]->CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; //设置加载模式,0加载
PWMDef[i]->CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// 设置比较寄存器的值
PWMDef[i]->CMPA.half.CMPA = 0; // 清零
PWMDef[i]->CMPB = 0; // 清零
// 设置动作限定;首先默认为转动方向为正转,这时只有PWMiA输出占空比;
PWMDef[i]->AQCTLA.bit.ZRO = AQ_SET; // 计数到0时PWMxA输出高电平
PWMDef[i]->AQCTLA.bit.CAU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWMxA输出
PWMDef[i]->AQCTLB.bit.ZRO = AQ_CLEAR; // 计数到0时PWMxB输出低电平
PWMDef[i]->AQCTLB.bit.CBU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWMxB输出
// 1次0匹配事件发生时产生一个中断请求;
PWMDef[i]->ETSEL.bit.INTSEL = ET_CTR_ZERO; // 选择0匹配事件中断
PWMDef[i]->ETSEL.bit.INTEN = 1; // 使能事件触发中断
PWMDef[i]->ETPS.bit.INTPRD = ET_1ST; // 1次事件产生中断请求
EDIS;
}
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC =1;
EDIS;
IER |= M_INT3; //中断初始化
PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
PieCtrlRegs.PIEIER3.bit.INTx2 = 1;
}
/*******************************************************************************
* 函 数 名: interrupt void epwm1_isr(void)
* 函数功能: 控制尾翼电机的转速
*******************************************************************************/
interrupt void epwm1_isr(void)
{
switch (Turningmodeselection){
case Noturn:
//保证下面EPWMA和EPWMB相互切换同时输出0电平;
EPwm1Regs.CMPA.half.CMPA = 0;//改变脉宽
EPwm1Regs.CMPB = 0; //改变脉宽
break;
case Turnleft:
//保证下面EPWMA和EPWMB相互切换同时输出0电平;
EPwm1Regs.CMPA.half.CMPA = 0;//改变脉宽
EPwm1Regs.CMPB = 0; //改变脉宽
EPwm1Regs.AQCTLA.bit.ZRO = AQ_CLEAR; // 计数到0时PWM1A输出低电平
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWM1A输出
EPwm1Regs.AQCTLB.bit.ZRO = AQ_SET; // 计数到0时PWM1B输出高电平
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWM1B输出
EPwm1Regs.CMPA.half.CMPA = Vertailmotor_PWM;
EPwm1Regs.CMPB = Vertailmotor_PWM;
break;
case Turnright:
//保证下面EPWMA和EPWMB相互切换同时输出0电平;
EPwm1Regs.CMPA.half.CMPA = 0;//改变脉宽
EPwm1Regs.CMPB = 0; //改变脉宽
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET; // 计数到0时PWM1A输出高电平
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWM1A输出
EPwm1Regs.AQCTLB.bit.ZRO = AQ_CLEAR; // 计数到0时PWM1B输出低电平
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWM1B输出
EPwm1Regs.CMPA.half.CMPA = Vertailmotor_PWM;
EPwm1Regs.CMPB = Vertailmotor_PWM;
break;
default:
break;} // end switch
EPwm1Regs.ETCLR.bit.INT = 1; // 清除中断标志位
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3; // 清除PIE应答寄存器
}
/*******************************************************************************
* 函 数 名: interrupt void epwm2_isr(void)
* 函数功能: 控制机翼电机的转速
*******************************************************************************/
interrupt void epwm2_isr(void)
{
if(MOTO1_PWM>=CMPX_MAX) MOTO1_PWM = CMPX_MAX;
if(MOTO1_PWM<=CMPX_MIN) MOTO1_PWM = CMPX_MIN;
EPwm2Regs.CMPA.half.CMPA = MOTO1_PWM;
EPwm2Regs.ETCLR.bit.INT = 1; // 清除中断标志位
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3; // 清除PIE应答寄存器
}
/*******************************************************************************
* 函 数 名: void MotorPwmFlash(int16_t MOTO1_PWM,int16_t MOTO2_DELAY,uint8_t Turningmodeselection)
* 函数功能: 更新主翼电机占空比和尾翼转向
*******************************************************************************/
void MotorPwmFlash(int16_t MOTO1_PWM2,uint8_t Turningmodeselecting)
{
MOTO1_PWM=MOTO1_PWM2;
Turningmodeselection=Turningmodeselecting;
}
Moto.h:
#ifndef INC_MOTO_H_
#define INC_MOTO_H_
#include "extern_variable.h"
#define PWM_FRE 600000
#define EPWM_TIMER_TBPRD 999
/* 电机档位定义*/
#define CMPX_MIN 0
#define CMPX_HALF 500
#define CMPX_MAX 999
#define Vertailmotor_PWM 300
extern uint8_t Turningmodeselection;
extern uint16_t MOTO1_PWM;
enum {Noturn = 0,Turnleft,Turnright};
#define nSLEEP GPIO5
#define nSLEEPMUX GpioCtrlRegs.GPAMUX1.bit.nSLEEP
#define nSLEEPDIR GpioCtrlRegs.GPADIR.bit.nSLEEP
#define nSLEEPTOGGLE() GpioDataRegs.GPATOGGLE.bit.nSLEEP = 1
#define nSLEEPON() GpioDataRegs.GPASET.bit.nSLEEP =1
#define nSLEEPLOW() GpioDataRegs.GPACLEAR.bit.nSLEEP =1
#define MODE GPIO4
#define MODEMUX GpioCtrlRegs.GPAMUX1.bit.MODE
#define MODEDIR GpioCtrlRegs.GPADIR.bit.MODE
#define MODETOGGLE() GpioDataRegs.GPATOGGLE.bit.MODE = 1
#define MODEON() GpioDataRegs.GPASET.bit.MODE =1
#define MODELOW() GpioDataRegs.GPACLEAR.bit.MODE =1
#define BIN2 GPIO0
#define BIN2MUX GpioCtrlRegs.GPAMUX1.bit.BIN2
#define BIN2DIR GpioCtrlRegs.GPADIR.bit.BIN2
#define BIN2TOGGLE() GpioDataRegs.GPATOGGLE.bit.BIN2 = 1
#define BIN2ON() GpioDataRegs.GPASET.bit.BIN2 =1
#define BIN2LOW() GpioDataRegs.GPACLEAR.bit.BIN2 =1
#define BIN1 GPIO1
#define BIN1MUX GpioCtrlRegs.GPAMUX1.bit.BIN1
#define BIN1DIR GpioCtrlRegs.GPADIR.bit.BIN1
#define BIN1TOGGLE() GpioDataRegs.GPATOGGLE.bit.BIN1 = 1
#define BIN1ON() GpioDataRegs.GPASET.bit.BIN1 =1
#define BIN1LOW() GpioDataRegs.GPACLEAR.bit.BIN1 =1
#define AIN2 GPIO2
#define AIN2MUX GpioCtrlRegs.GPAMUX1.bit.AIN2
#define AIN2DIR GpioCtrlRegs.GPADIR.bit.AIN2
#define AIN2TOGGLE() GpioDataRegs.GPATOGGLE.bit.AIN2 = 1
#define AIN2ON() GpioDataRegs.GPASET.bit.AIN2 =1
#define AIN2LOW() GpioDataRegs.GPACLEAR.bit.AIN2 =1
#define AIN1 GPIO3
#define AIN1MUX GpioCtrlRegs.GPAMUX1.bit.AIN1
#define AIN1DIR GpioCtrlRegs.GPADIR.bit.AIN1
#define AIN1TOGGLE() GpioDataRegs.GPATOGGLE.bit.AIN1 = 1
#define AIN1ON() GpioDataRegs.GPASET.bit.AIN1 =1
#define AIN1LOW() GpioDataRegs.GPACLEAR.bit.AIN1 =1
/* 包含头文件*/
void InitMotor(void);
void InitEPWM_AQ_DB(void);
void MotorPwm1Flash(int16_t MOTO1_PWM);
interrupt void epwm1_isr(void);
void MotorPwm2Flash(uint8_t Turningmodeselection);
interrupt void epwm2_isr(void);
void MotorPwmFlash(int16_t MOTO1_PWM,uint8_t Turningmodeselection);
#endif /* INC_MOTO_H_ */
这段代码可以正常运行、我个人认为这段代码没有问题、但电机无法正常旋转、所以我不知道问题出在哪里。
当代码正常运行时,我希望图片显示出额定电压为3.7V 的空心杯马达可以正常旋转。
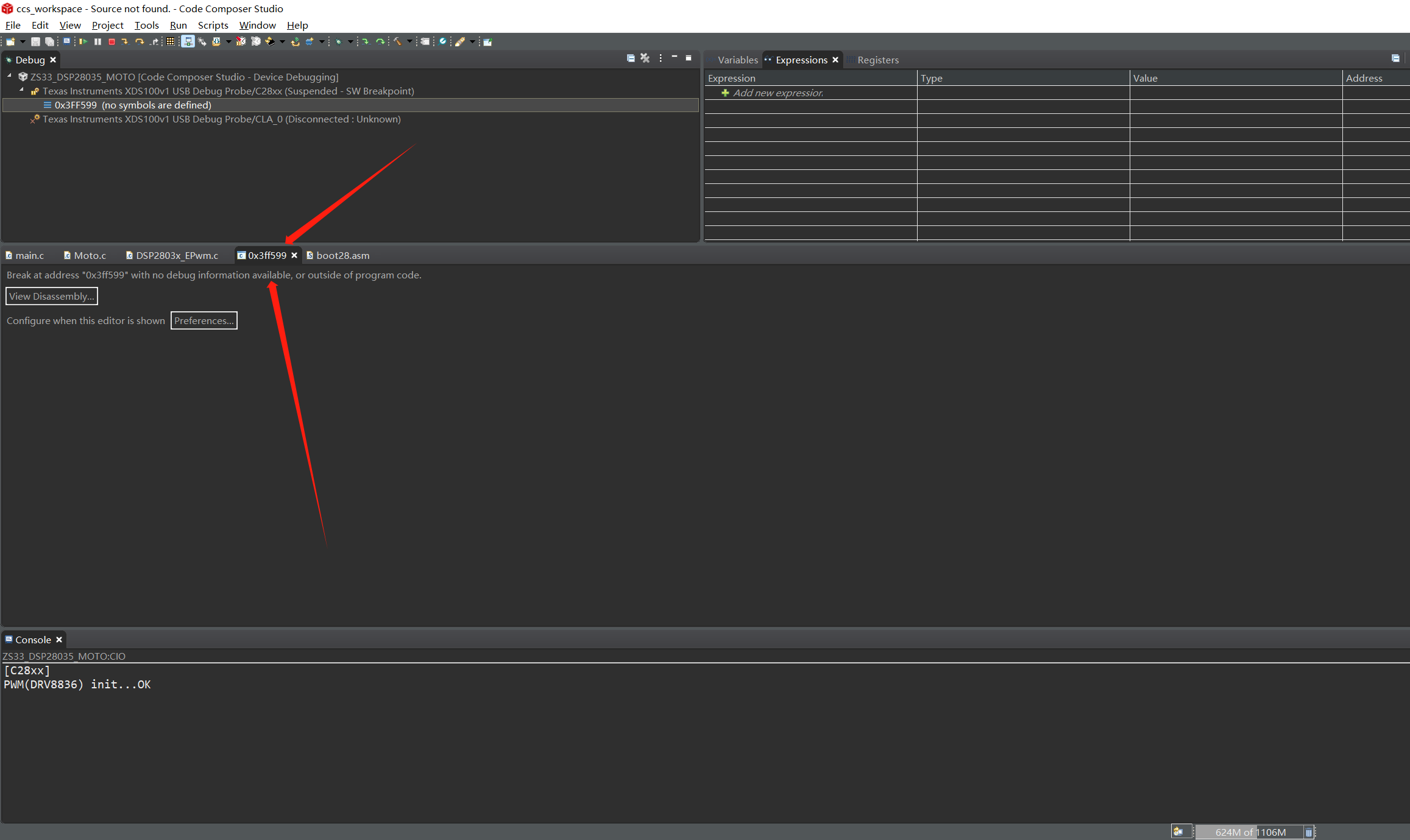
但实际情况是电机根本不旋转、CCS 软件接口跳转到一个奇怪的接口、如下图所示。
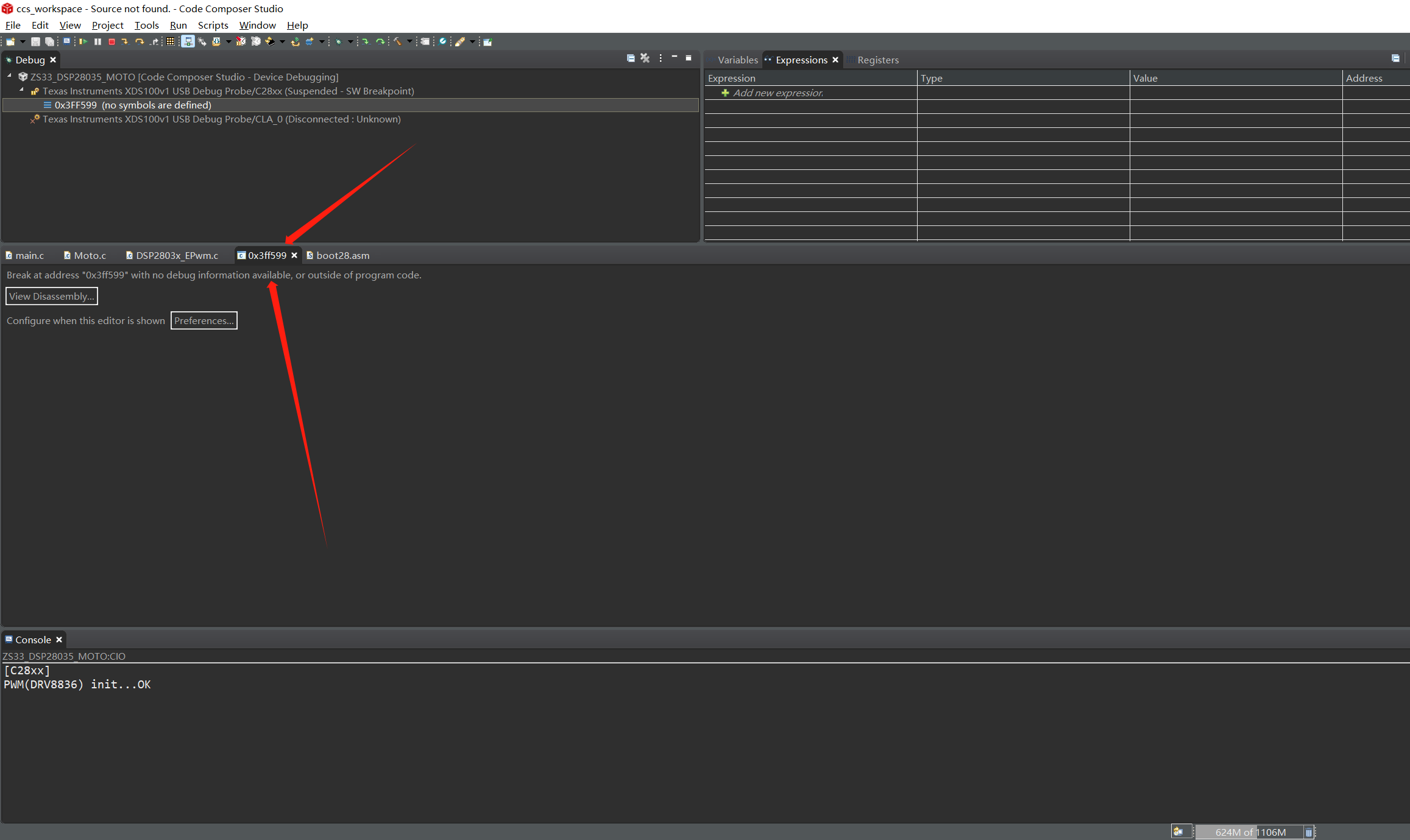
空心杯电机的两根电线正确连接到(AOUT1、AOUT2)或(BOUT1、BOUT2)接口、电机不仅无反应、而且软件将进入上面的接口。
尽管空心杯马达的额定电压为3.7V,但它可以通过连接到马达的1.5V 电压进行旋转。
我给 DRV8836的电源电压在1S 锂电池分压后对于整个电路是3.3V、我没有直接将1S 锂电池接至 DRV8836 (VCC 和 GND)。
在我的测试中、我发现在正常运行情况下、当我连接(AOUT1直接连接到 AOUT2)或(BOUT1直接连接到 BOUT2)时、也会出现上图中的 CCS 接口。
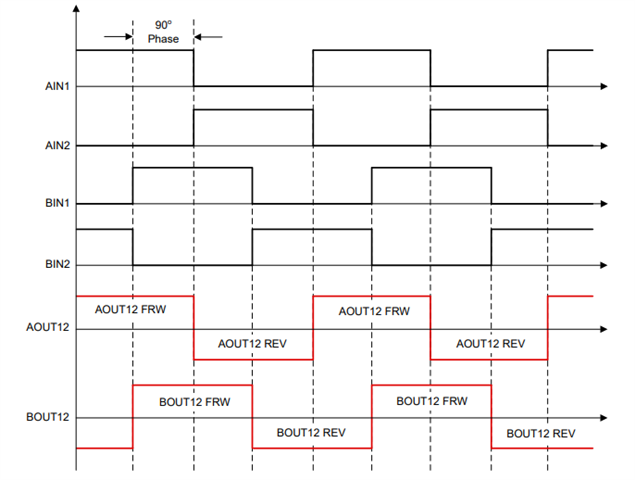
我使用 EPWM2A 连接 AIN2和 EPWM2B 来连接 AIN1、给定的占空比为80%。 我通过示波器正确观察到了波形。 根据预期计算,AOUT1和 AOUT2引脚的电压输出为3.3V*0.8=2.64V,足以驱动空心杯电机,但电机在插入后不移动,且软件停止调试。
1.代码有问题吗?
2.硬件电路有问题(1S 锂电池应该直接连接到8836的 VCC 和 GND 吗?)
3、CCS 为什么有一个不熟悉的接口? (我正在使用 XDS100V1仿真器)
4.如何配置中空杯马达以使其正常运行?
您能帮助检查这个问题吗? 谢谢。
此致、
切里