

TI 团队您好
我最近使用 DRV8350H 构建了一个三相逆变器电路(电机驱动器)。
我想看看有多少个问题、以及设计是否符合 DRV8350H 的要求。
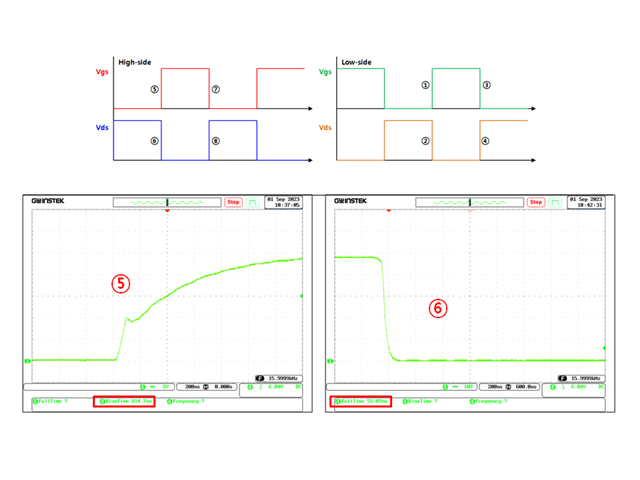
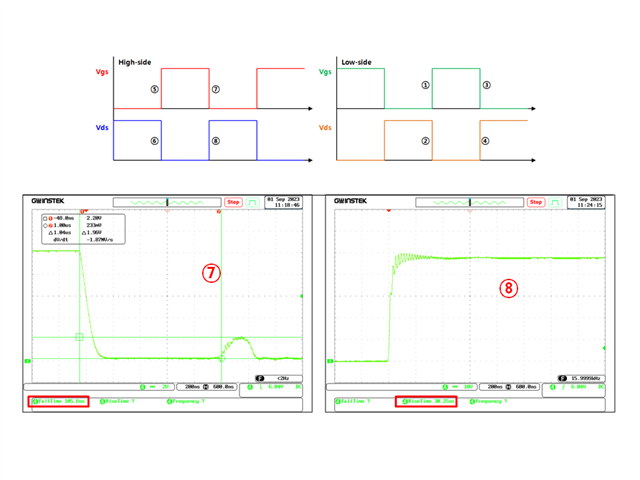
1.在高侧导通期间查看 VGS 的波形时、看起来很慢。
在另一种情况下、高侧关断、低侧导通/关断看起来很快。
我可以在提供的数据表中看到慢速 Vgs (高侧导通)波形。
但是、Vds 的上升时间看起来比慢速 Vgs 更快。
这是预期的 Vgs 波形吗? 是否有理由只减慢高侧 VGS 导通速度?
此外、根据应用手册(了解智能栅极驱动器)、
智能栅极驱动器系列的导通/关断时间被视为米勒区域对流向 CGD 的电流进行充电/放电的时间、
而不是 Vgs 的上升/下降时间。 我明白了。 正确理解它是否正确?
2.关于四 PWM 模式。
在我当前的设计中、我设置了独立模式。
此模式用于配置三相逆变器电路且高/低侧互补运行的状态。
此时、栅极驱动器无法通过测量 MOSFET VDS 的电压来检测过流情况?
在连接三相电机负载的电路中、是否应该使用6 PWM 模式来使用过流检测功能?
如果我在 DRV8350H 上使用6 PWM 模式、则死区时间被确认为固定的100ns。
如果在栅极驱动器上应用 PWM 时 MCU 中的时间超过100ns、则会忽略栅极驱动器的固定死区时间并生成输出?
例如、如果在 MCU 中应用400ns 的死区时间、则最终从栅极驱动器输出的死区时间为400ns (而不是500ns)?
3.我慢慢地提高了 IDRIVE 并努力找到合适的值。
因此、我们确认300mA 输出(IEP)是最佳的。
在450mA 中、经证实当另一侧的 MOSFET 导通而必须关断 Vgs 时、Vgs 显著上升。
已确认该值上升至更接近 MOSFET 的 Vgs (th)、并且 IDRIVE 设置值不可用。
如何改进这一点并提高 IDRIVE?
使用的 MOSFET 规格为 VDS = 100V、ID = 230A、CGD = 11.9nC、Vgs (th)= 2.8V
问题如此之长... 感谢您的阅读。
