请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8424 大家好、
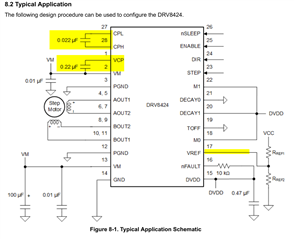
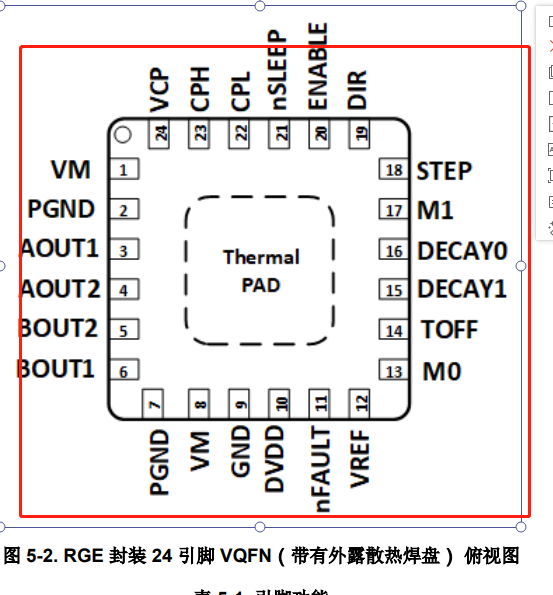
DRV8424RGER 驱动芯片采用 STM32F302RBT6单片电路来控制驱动电机的旋转。
按如下方式初始化 DRV8424的 GPIO:
MX_DRV8424_GPIO_Init ();
//PC10关闭中断
STEP_TOFF (0);
//修改1/8步长
STEP_MODE_0 (1);
STEP_MODE_1 (1);
//设置1/32步进
// STEP_MODE_0 (0);//+ MODE1设置为悬空输入
//衰减模式:智能调优纹波控制
STEP_DECAY_0 (0);
STEP_DECAY_0 (1);
STEP_SLEEP_N (1);
//PA4 DAC 输出0.66V、用于电流输出控制
STEP_ENABLE (1);
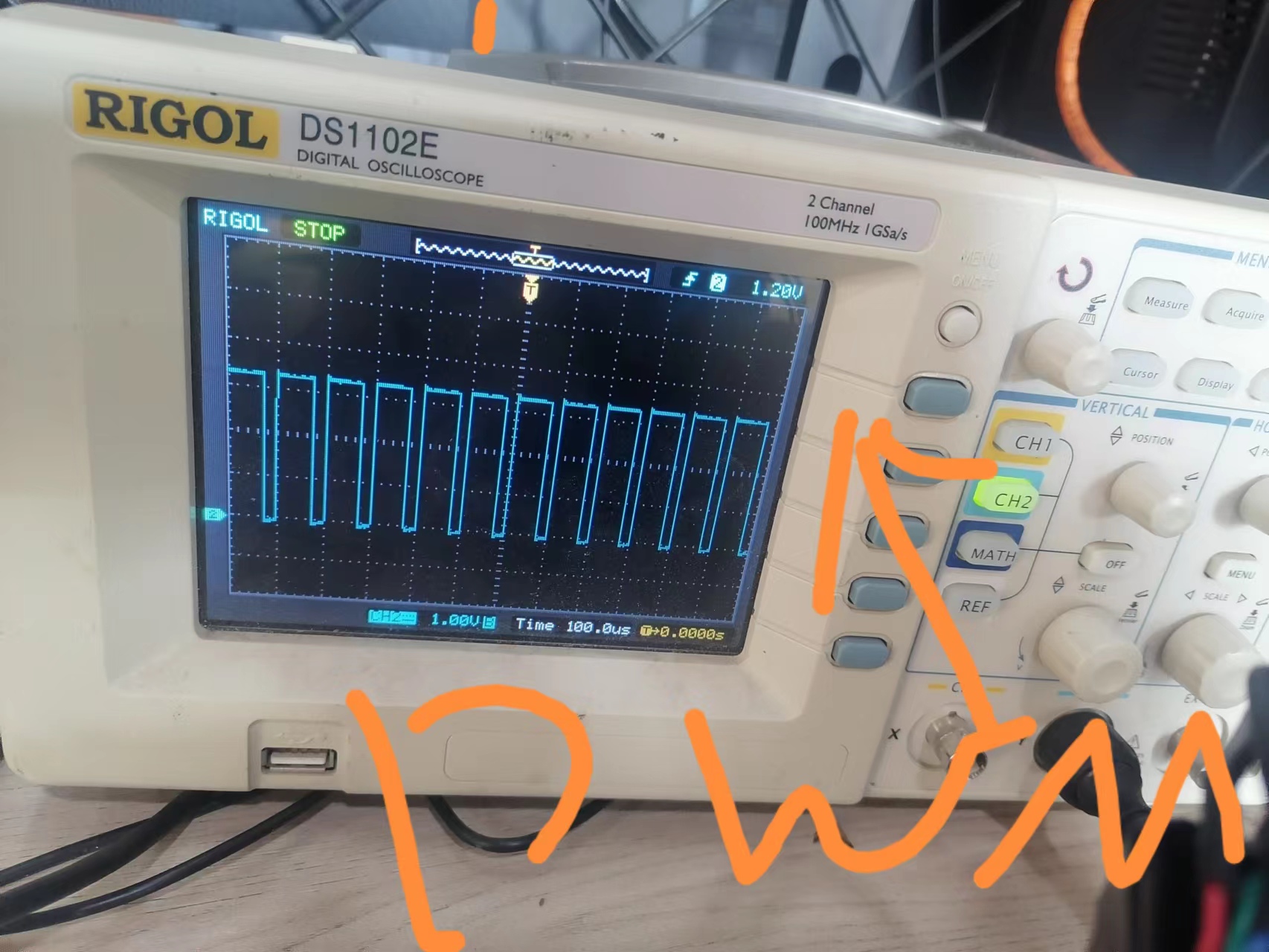
但当前的 行为 是电机有声音、但不 旋转。 您能帮助检查这个问题吗? 谢谢。
此致、
切里