请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
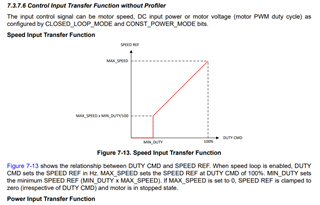
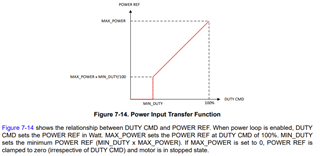
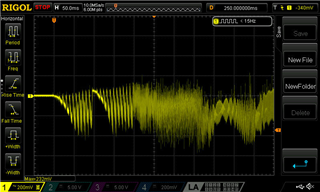
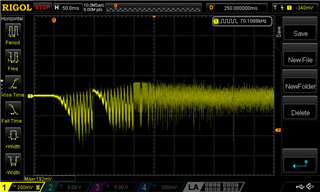
器件型号:MCT8329A 尽管 MCT8329A 的 EEPROM 已可靠地写入 EEPROM、但命令的电机输出(运行)预计每三次启动就会出现几次、但电机输出大约每三次低于命令的预期输出。 输入是一个 PWM 输入、每个设置值均已在 EEPROM 中设置。 我很难理解这一问题的原因。
是否有任何引用(如要在启动时执行的此序列)必须按照此顺序进行处理? 或者您过去是否遇到过此类情况?
e2e.ti.com/.../20231012_5F00_double_5F00_align_5F00_closed_5F00_loop.txt