请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
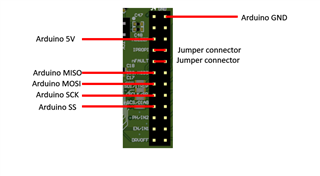
器件型号:DRV8244S-Q1LEVM 您好、我在设置电路板时需要支持。 我已经使用 Arduino 引脚连接了评估板。
GND - GND
引脚13 - SCLK
引脚12 - SDO
引脚11 - SDI
引脚10 - nSCS
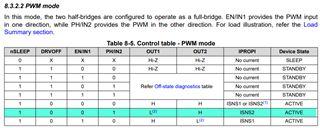
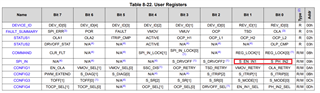
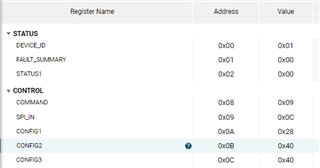
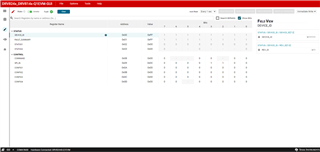
寄存器映射如下所示:
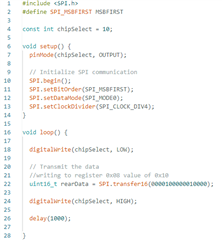
您可以分享 Arduino 代码示例来驱动电机吗? 谢谢。
-安盖特
您好、我在设置电路板时需要支持。 我已经使用 Arduino 引脚连接了评估板。
GND - GND
引脚13 - SCLK
引脚12 - SDO
引脚11 - SDI
引脚10 - nSCS
寄存器映射如下所示:
您可以分享 Arduino 代码示例来驱动电机吗? 谢谢。
-安盖特