请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-DRV8323RH 您好!
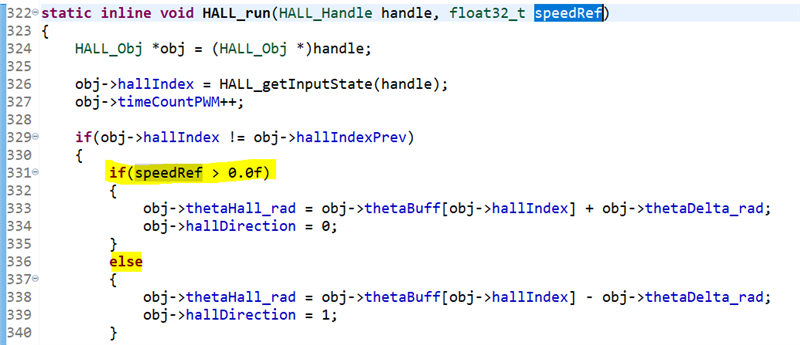
当 Ref_Hz 输入正值时、比如电机顺时针旋转、当速度 Ref_Hz 变为0时、速度451Hz 变为负值、电机仍顺时针旋转... 停止电机的唯一方法是 flagEnableRunAndIdentify 为0!
上述问题仅适用于霍尔模式、快速模式而不会出现问题。
丹尼
您好!
当 Ref_Hz 输入正值时、比如电机顺时针旋转、当速度 Ref_Hz 变为0时、速度451Hz 变为负值、电机仍顺时针旋转... 停止电机的唯一方法是 flagEnableRunAndIdentify 为0!
上述问题仅适用于霍尔模式、快速模式而不会出现问题。
丹尼