This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1317542/mcf8316aevm-evm-board-can-not-drive-the-motor
我完全按照说明进行电机连接、但当我运行 mpet 或尝试使用电位器运行 tu 电机时、会出现 controller_fault。
当我写入 mpet 值并尝试驱动电机时、电机没有移动、但控制器故障消失了。
您好、Ozgur。
该器件正在进入 MPET_IPD_FAULT 状态、当 MPET 无法测量电机电阻和电感时会发生这种情况。 如果没有电机连接到器件的相位引脚、或者 MPET IPD 电流阈值[MPET_IPD_CURRENT_LIMIT]对于具有高电阻的电机设置过低、则会触发此故障。
有关解决此故障的步骤、请参阅 MCF8316A 调优指南的第3.6.1节。
此致、 埃里克·C·
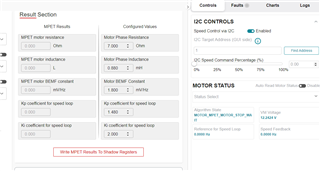
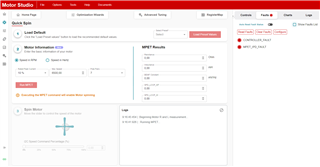
大家好、Eric、 MPET_IPD_CURRENT_LIMIT 为20%、这是我可以从 Motor Studio 中给出的最高值。 然后、这里的主要问题是、尽管要手动提供电机参数、EVM 板仍然无法驱动。
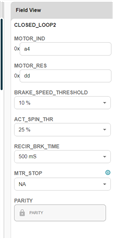
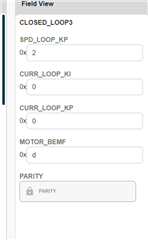
如此处所示。 我将这些值从电机数据表中写入。 当我尝试从 I2C 控制面板控制电机时、电机没有运行。
您能否确保您已输入电机相位到中心抽头 R、L 和 KE? 如果您也可以提供电机数据表、那将会很有帮助。
当您更改 I2C 速度命令时、启用 Auto Read Motor Status 切换按钮、并且您是否观察到从电机空闲状态到算法状态的任何变化?
谢谢!
? ?? 说:a
电阻、电感和反电动势常数取自电机数据表。 我使用的电机有7个极对。 当我更改 I2C 命令时、它会给出 MOTOR_MPET_MOTOR_STOP_WAIT 算法状态。
您可以帮助检查 EVM 上的电位器是否一直顺时针旋转吗? 这是为了防止器件在通电后立即接收非零速度命令。
此致、
埃里克·C·
我觉得你不明白我的问题在这里。 我按照文件中的程序操作。 我创建了必要的硬件配置。 不过、MPET 功能无法正常工作。 我用手提供参数、然后电机开始移动、但仍然不能正常工作。 有时、控制器无法从开环切换到闭环模式。 有时、它认为它处于开环模式、电机正在旋转、但不会旋转。 您能否与我分享一份用于指导的详细文档?
很抱歉没有澄清。 我要求您确保电位器一直逆时针转动的原因是、看起来器件仍在尝试运行 MPET (卡在 MOTOR_MPET_MOTOR_STOP_WAIT 状态)。
当您首次为器件加电时、如果存在非零速度命令、那么如果存在非零速度命令、器件将立即尝试运行 MPET 5个参数(R、L、KE、速度环路 Kp、速度环路 Ki)中的任何一个都为零 。 然后、即使您在之后手动输入参数、器件仍在尝试运行 MPET 时卡住。 通过确保没有速度命令、可以确保器件已通电并保持 MOTOR_IDLE 状态、同时输入 自己的 R、L、KE、KP、KI 值。 之后、当您发出速度命令时、您应该不会看到任何与 MPET 相关的算法状态。 相反、您应该会看到算法状态进入电机启动(Align /IPD)->开环->闭环。 为确保这一点、您可以 在为 EVM 通电并连接到 GUI 之后立即使用侧面板中的 Auto Read Motor Status 切换按钮来检查算法状态是否为 MOTOR_IDLE。
我要指出的另一点是 MCF8316A 有一个勘误表(在本 E2E 常见问题解答中排名第8)、其中器件 在电机运行期间接收到 I2C 命令时可能会锁定。 此勘误表仅影响 MCF8316A 、并在 MCF8316C 或其他 MCF 器件中修复。 遗憾的是、当您将 I2C Speed Command 滑块设置为非零值时、Motor Studio GUI 会在侧面板中自动启用 Auto Read Motor Status 功能、因此这可能会很容易引发此勘误。 解决方法是在将 I2C 速度命令滑块更改为非零值后立即禁用 Auto Read Motor Status 切换。
最后、您可以参阅 MCF8316A 调 优指南、获取有关调优过程和寄存器设置的更详细文档。



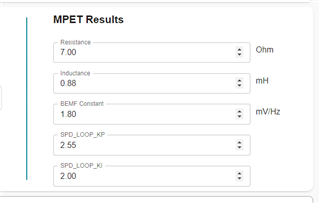 如此处所示。 我将这些值从电机数据表中写入。 当我尝试从 I2C 控制面板控制电机时、电机没有运行。
如此处所示。 我将这些值从电机数据表中写入。 当我尝试从 I2C 控制面板控制电机时、电机没有运行。