This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1314147/drv2624-diag_result-bit-for-calibration-mode
大家好、 数据表显示 DIAG_RESULT 位用于确保自动校准例程完成而不会失败。 您能告诉我 DRV2624是如何确定 自动校准例程中是"0"还是"1"的吗? 问题的背景是、我的客户考虑在制造过程中执行自动校准程序、并且希望确定原因并考虑在 DIAG_RESULT ="1"(校准失败)时如何修复它。 此致、 矢田市
尊敬的 Yaita-San:
校准失败的主要原因是相关的寄存器未正确设置。 如果没有 寄存器配置将导致通过校准、电机的反电动势可能过高、但同一型号的电机之间变化不应过大。 数据表中8.3.2.5自动级别校准和8.6.2自动级别校准编程下的各节共享与自动校准例程相关的参数。
此致、 悉尼诺斯卡特
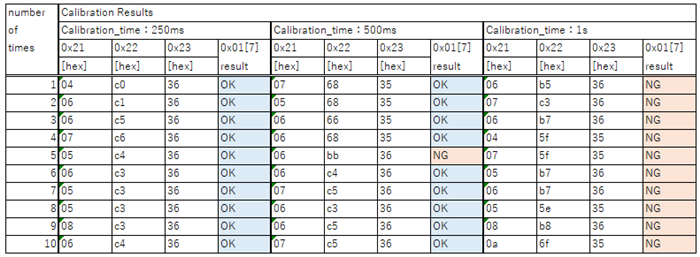
尊敬的 Sydney-San: 感谢您的答复。 我的客户进行了自动校准、结果如下。 [测试条件] -使用相同的执行器和板。 -执行10次每个校准时间为250ms, 500ms 和1s。 1) 1)我们相信、即使校准 失败、0x21、0x22和0x23参数也会在自动校准中更新。 是这样吗? 2) 2) 2)您知道校准时间为500ms 时校准失败的原因(1/10)吗? 3) 3) 校准时间为 1s 时、您知道校准失败的原因(10/10)吗? 此致、 矢田市
我首先想澄清一下我之前的回答 、虽然 同一型号传动器的校准结果不应有太大差异、但我们建议 在生产中每个传动器至少运行一次校准、以确保令人满意的性能。
1.正确。
2.- 3. 在250ms 时通过校准后、驱动执行器时结果是否令人满意? 为了通过校准获得正确的结果、 需要驱动传动器足够的时间才能达到稳定状态。 有可能这个执行器的反电动势为高电平、所以一旦它达到稳定状态、它就会发生故障、但由于反电动势较低、它在达到稳定状态之前经过。 另一种可能是用于校准的其他寄存器未随不同的校准时间正确设置。 如果在250ms 时结果不令人满意、我建议 更改与自动校准相关的寄存器。
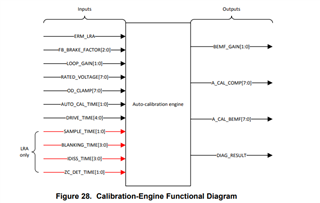
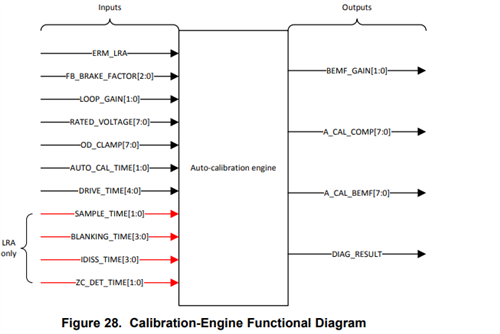
尊敬的 Sydney-San: >在250ms 通过校准后,驱动执行器的结果是否令人满意? 我的客户有时会看到 DRV2624组装到外壳中的抖动。 此外、他对结果感到不舒服、因为校准在500ms 时失败、尤其是1s 时。 考虑您的意见、我们认为如果 校准时间 更长、判断结果就会更准确。 如果我们假定致动器的反电动势较高、那么我们首先应该调节哪个参数? ---------------- (a) LRA_ERM -选择取决于所需的传动器。 (b) FB_BRAKE_FACTOR[2:0]—值3对大多数执行器有效。 (c) LOOP_GAIN[1:0]—值2对大多数传动器有效。 (d) RATED_VOLTAGE[7:0]—请参见"额定电压编程"部分、以计算正确的 寄存器值。 (E) OD_CLAMP [7:0]—请参阅过驱电压钳位编程部分以计算正确的寄存器值。 (f) AUTO_CAL_TIME[1:0]—值3对大多数执行器有效。 (g) DRIVE_TIME[3:0]—请参阅驱动时间编程以计算正确的寄存器值。 (h) SAMPLE_TIME[1:0]—值3对大多数传动器有效。 (i)消隐时间[3:0]—值1对大多数致动器有效。 (j) IDISS_TIME[3:0]—值1对大多数执行器有效。 (k) ZC_DET_TIME[1:0]—值0对大多数致动器有效。 ---------------- 此致、 矢田市
您好!
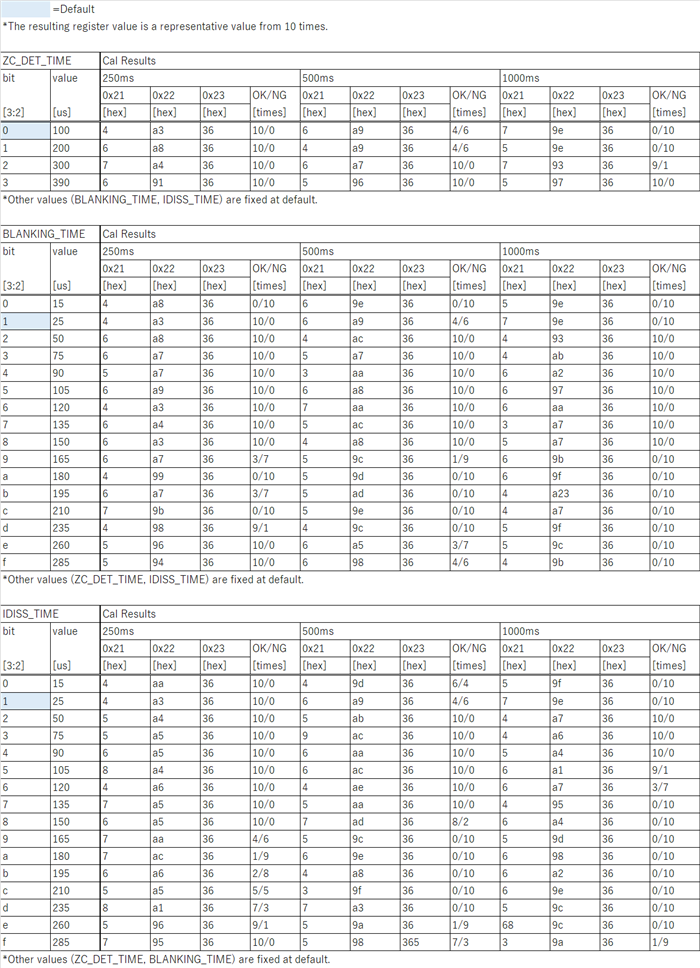
我建议增加 IDISS_TIME[3:0]、 BLANK_TIME[3:0]和 ZC_DET_TIME[1:0]。 另外、请确保 DRIVE_TIME[4:0]设置为 LRA 谐振周期的一半、并且针对 LRA 正确设置了额定电压和 OD 钳位电压。 另外、您能否分享传动器的数据表?
尊敬的 Sydney-San: 感谢您的建议。 我的客户不能公开 LRA 数据表、因此我们按如下方式放入了 LRA 规范。 ---------------- [LRA 规范] 运行电压:0.1 - 1.25Vrms 交流 额定电压:1.2±0.05Vrms 交流、正弦波 额定电流:Max 70mA 频率:240±10Hz 电阻:21±3Ω ---------------- 我的客户的当前设置如下。 ---------------- (b) FB_BRAKE_FACTOR[2:0]—值3对大多数执行器有效。 -> 0x03 (c) LOOP_GAIN[1:0]—值2对大多数传动器有效。 -> 0x01 (d) RATED_VOLTAGE[7:0]—请参阅"额定电压编程"部分以计算正确的寄存器值。 -> 0x2b※该值是确定的,包括裕度。 (E) OD_CLAMP [7:0]—请参阅过驱电压钳位编程部分以计算正确的寄存器值。 -> 0x4b※该值是确定的、包括裕度。 (f) AUTO_CAL_TIME[1:0]—值3对大多数执行器有效。 -> 0x00 (g) DRIVE_TIME[3:0]—请参阅驱动时间编程以计算正确的寄存器值。 -> 0x10 (h) SAMPLE_TIME[1:0]—值3对大多数传动器有效。 -> 0x03 (i)消隐时间[3:0]—值1对大多数致动器有效。 -> 0x01※建议增加值 (j) IDISS_TIME[3:0]—值1对大多数执行器有效。 -> 0x01※建议增加值 (k) ZC_DET_TIME[1:0]—值0对大多数致动器有效。 -> 0x01※建议增加值 ---------------- 如果您需要其他信息或不清楚内容、请告诉我。 此致、 矢田市
感谢您的 LRA 信息共享。 您是否还能共享振动力?
请确保额定电压和 OD 钳位电压与数据表第23页的公式一致。 此外、增大建议的寄存器后、请随时更新结果。
尊敬的 Sydney-San: 感谢您的持续支持。 我添加了红色参数。 ---------------- [LRA 规范] 运行电压:0.1 - 1.25Vrms 交流 额定电压:1.2±0.05Vrms 交流、正弦波 额定电流:Max 70mA 频率:240±10Hz 电阻:21±3Ω 加速度:最小0.8Grms ---------------- >我建议增加 IDISS_TIME[3:0]、BLANK_TIME[3:0] 和 ZC_DET_TIME[1:0]。 我的客户进行了测试、结果得到了改进、正如您所提到的。 您能否 查看以下结果? [测试条件] -使用相同的执行器和板。 -执行10次每个校准时间为250ms, 500ms 和1s。 此致、 矢田市
悉尼今天和明天都不在办公室了,所以我会在这里敲门的。 这就像是增加悉尼给出的校准参数、以实现可靠的诊断。 但是、有时该值可能会太大、如数据所示。 您需要根据所使用的传动器确定能够产生可靠结果的正确参数集。 您是否对诊断程序还有任何疑问?
谢谢! J·麦克弗森
尊敬的 JEF-SAN: >您需要根据所使用的传动器确定产生可靠结果的正确参数集。 好的、 我们将考虑并应用合适的值。 ------------------------------------------------------- 数据表显示 DIAG_RESULT 位用于确保自动校准例程完成而不会失败。 您能告诉我 DRV2624是如何确定 自动校准例程中是"0"还是"1"的吗? ------------------------------------------------------- 关于上面的第一个问题、我的客户想知道 DRV2624如何在 自动校准例程中确定是"0"还是"1"的详细信息。 根据 Sydney-San 的回复、我们认为 DRV2624会监控电机的反电动势 。 是这样吗? 是否有有关阈值的详细信息? 此致、 矢田市
您从悉尼-圣(Sydney-San)的理解是正确的。 自动校准例程测量传动器的反电动势、以收敛到足够的校准值。 如果这些值无法收敛、则结果为失败。
因为该算法是专有的、我们没有详细介绍该算法本身、但数据表中的第8.6.1节详细介绍了每个参数以及设置该算法时应考虑的事项。
此致、 J·麦克弗森
尊敬的 JEF-SAN: 感谢您的支持。 我想提出以下两个问题。 1) 当自动校准失败时、是否有任何方法可以确认测得的反电动势值? (例如、读取寄存器等) 或者、我们能否通过测量 OUT+/OUT-波形来确认反 EMF 值? 2) 我的客户有时会看到、当 LRA 未提供可靠连接时、自动校准失败。 你认为这是 反 EMF 值无法收敛的结果吗? 此致、 矢田市
1) 1)否、我们没有用于读取反 EMF 值的寄存器、我认为无法通过示波器准确测量反 EMF 值。
2) 2)我不确定您是说 LRA 与器件没有适当的电气连接、或者它与质量没有牢固的连接、但这两者都肯定是校准失败的原因。
尊敬的 Sydney-San: 我的客户有时会看到、当 LRA 与质量没有牢固连接时、自动校准失败。 然而,他发现 BEMF_GAIN[1:0]、 A_CAL_COMP[7:0]和 A_CAL_BEMF[7 :0]值几乎没有区别,无论 DIAG_RESULT 的结果如何。 有可能吗? 我们认为建议 仅在 DIAG_RESULT=0时应用 BEMF_GAIN[1:0]、A_CAL_COMP[7:0]和 A_CAL_BEMF[7:0]值 、但希望在情况下确认。 此致、 矢田市
是的、这是可以实现的。 正如 Jeff 所提到的、由于来自执行器的反电动势未收敛、因此该方法会失败。
对、强烈建议 在驱动 LRA 之前通过校准、以便根据额定和过驱电压值正确进行驱动调节。
尊敬的 Sydney-San: 感谢您的回答。 我们认为自动校准过程的目的是确定适当的 BEMF_GAIN[1]、 A_CAL_COMP[7:0]和 A_CAL_BEMF[7 :0]值。 换句话说、 当使用相同的 LRA 采样时、如果 BEMF_GAIN[1:0]、A_CAL_COMP[7:0]和 A_CAL_BEMF[7:0]值与 DIAG_RESULT 结果无关、则性能将没有差异。 是这样吗? 此致、 矢田市
校准是否在失败之前通过? 我想问的是、我认为失败的校准不会更新输出寄存器、因此这些值会读回与 通过校准后未更新的值相同的值。
尊敬的 Sydney-San: 我们确认了 0x21、0x22和0x23参数在自动校准中更新、即使 校准失败 。 此外,我得到了你的答复如下。 ---------------- 1) 1)我们相信、即使校准 失败、0x21、0x22和0x23参数也会在自动校准中更新。 是这样吗? [悉尼-桑的答复] 1.正确。 ---------------- 此致、 矢田市
1) 1)这是可能的、但不是典型的。 可能存在一种独特的校准情况、在出现故障时会更新寄存器、但 DIAG_RESULT 值是您计算过程所依据的值。 强烈建议在继续前通过校准。