请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316AEVM 主题中讨论的其他器件:MSP430FR2355、 MCF8316A
大家好、
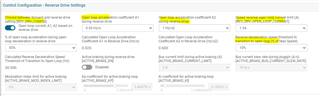
我有一个风扇设计项目、我使用 TI 的 MCF8316AVRGFR 驱动器和 MCU MSP430FR2355。 因此一切都很好。 但是 、当我在 GUI 1.1.8中将模式从正向旋转设置为反向旋转时、我 测量了相电流。 结果如下:
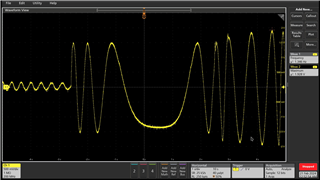
电机正向旋转、从高速到低速。 转速很低时、电机被图中的电流制动、电机反向旋转。
我不知道要使用的制动电机以及如何使用 MCF8316A 产生制动电流来制动电机。
您能否向我展示如何操作并提供一些解决方案?
此致、
Vuong N.T.