请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8703-Q1 您好、专家:
我在调试过程中遇到一些困难。
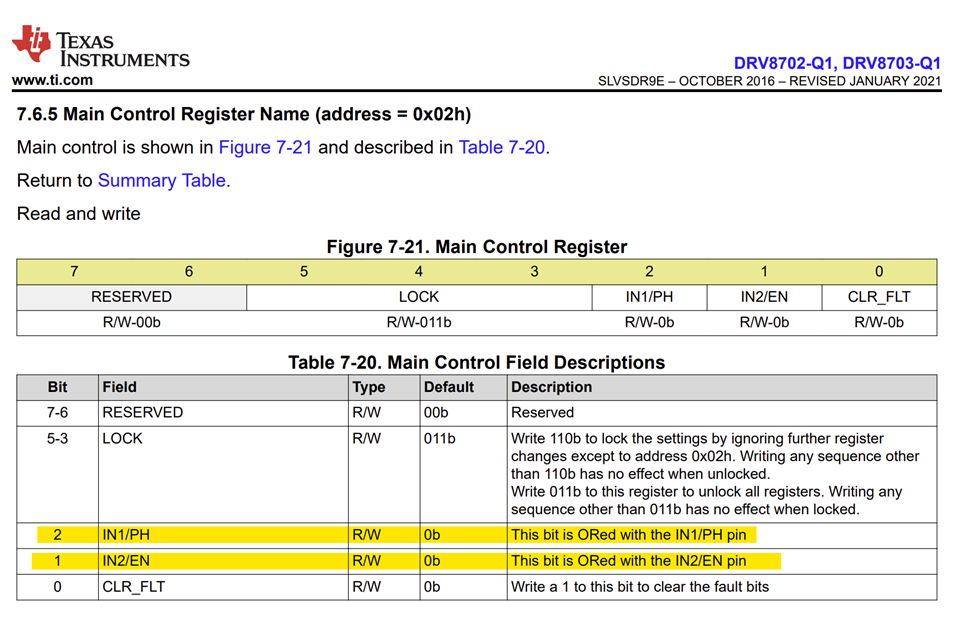
现在 我可以执行 SPI 通信,但 无法获取 PWM。
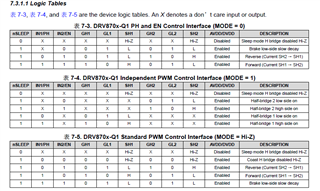
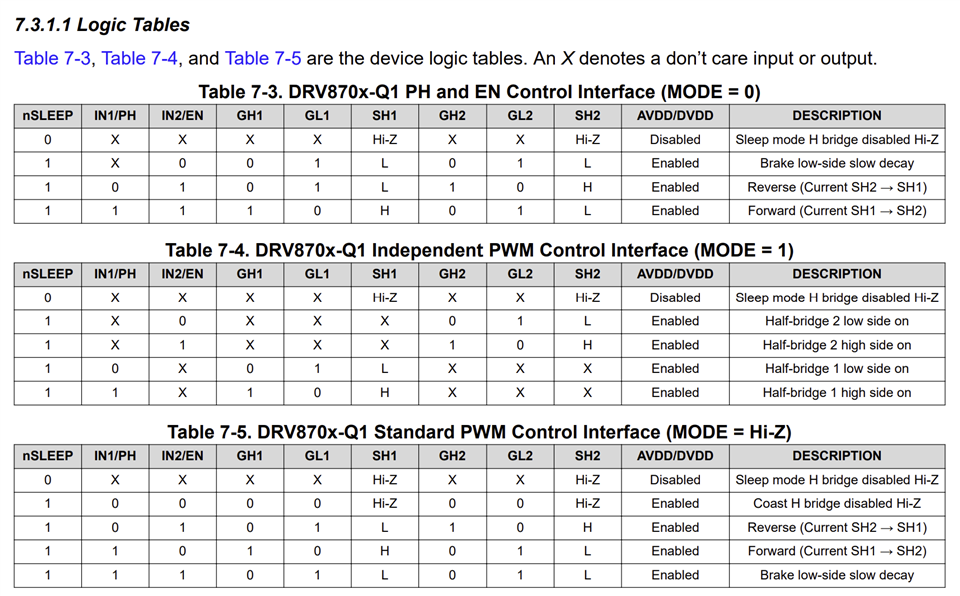
根据我的理解,只要我设置"nSLEEP"=1 ,"MODE"=HiZ ,"IN1"=1"IN2"=0 ,我就会得到 PWM。 (如果我错了、请提醒我)
但 我设置"nSLEEP"= 1、"MODE"= HiZ、"IN1"= 1 "IN2"= 0、 VDS 和 GDF 状态寄存器= 0x04。无论我如何配置它、 VDS 始终会发生过流。 我想知道我是否错过了一些东西
Br、
环银