请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8873H-Q1EVM 大家好!
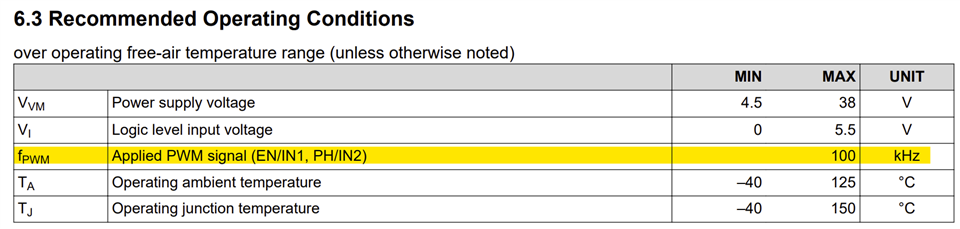
我已经使用 DRV8873H-Q1 (硬件版本)设计了电机驱动器
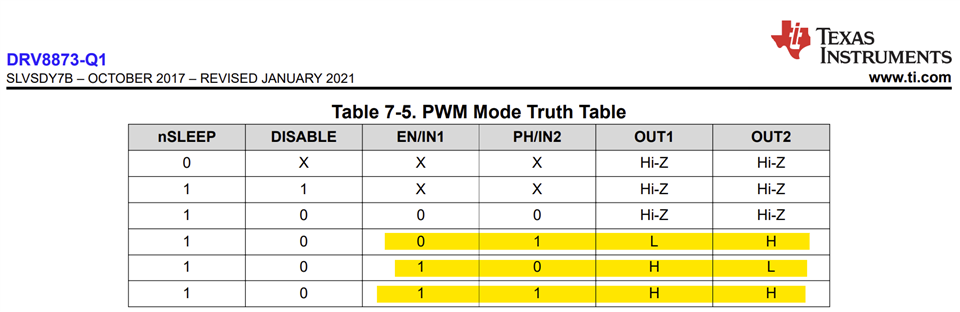
1) 1)选择的 MODE = H 用于 PWM
2)请告诉我最大 PWM 频率是多少?
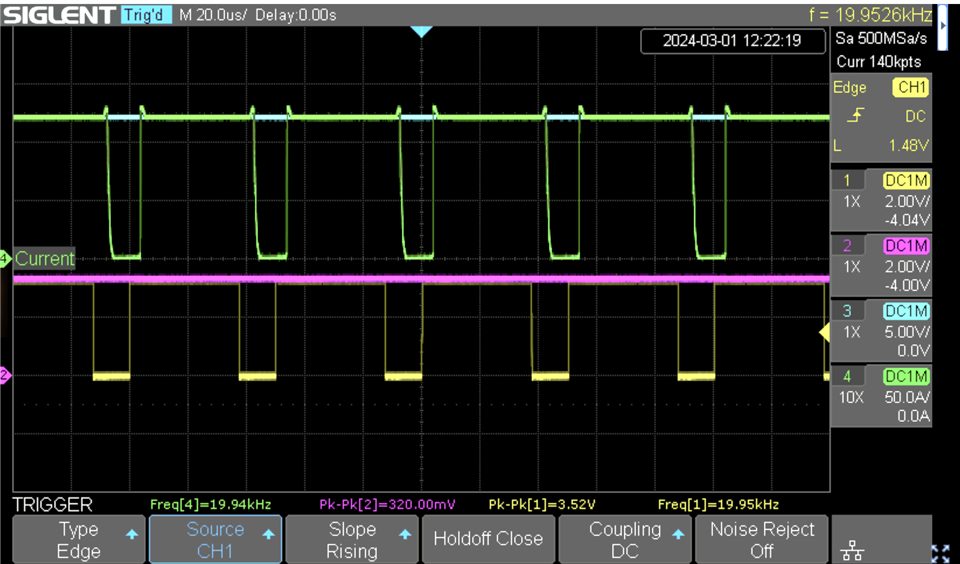
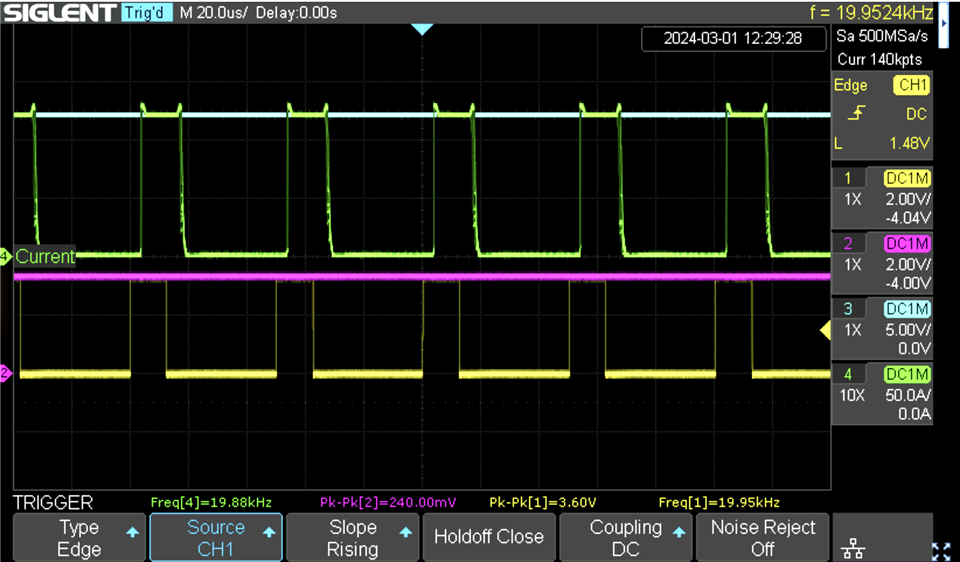
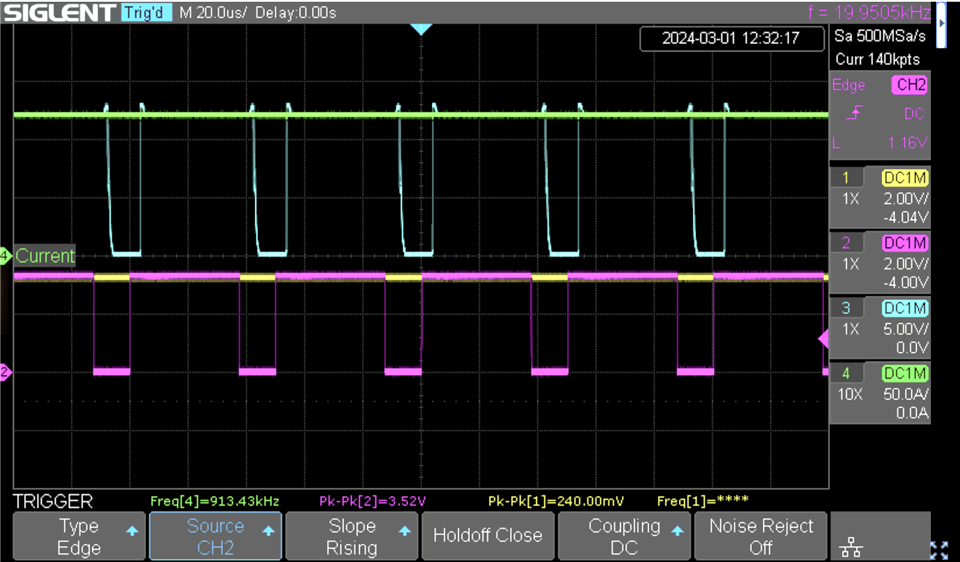
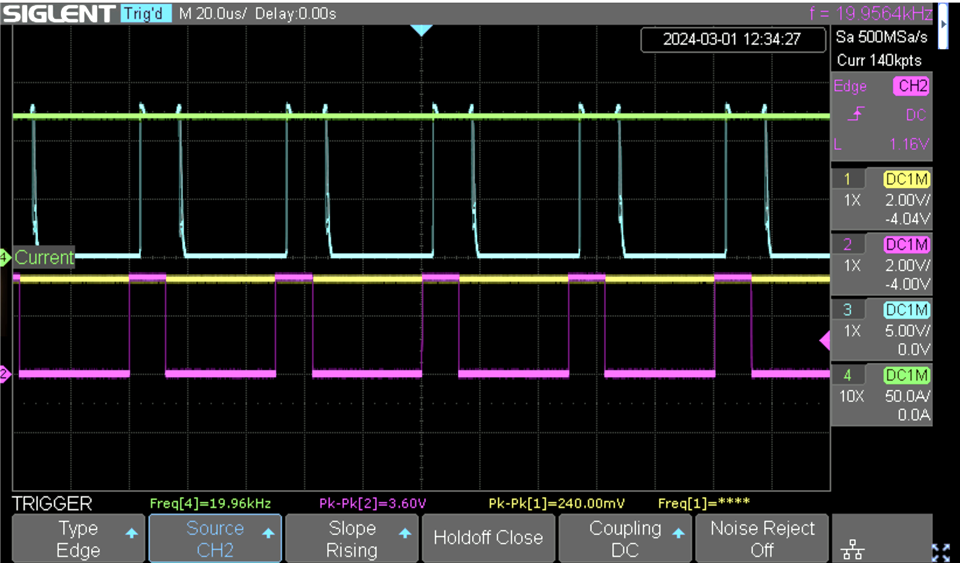
3) 3)在 PWM 模式下、某些人可以与 IN1和 IN2共享 OUT1和 OUT2波形。
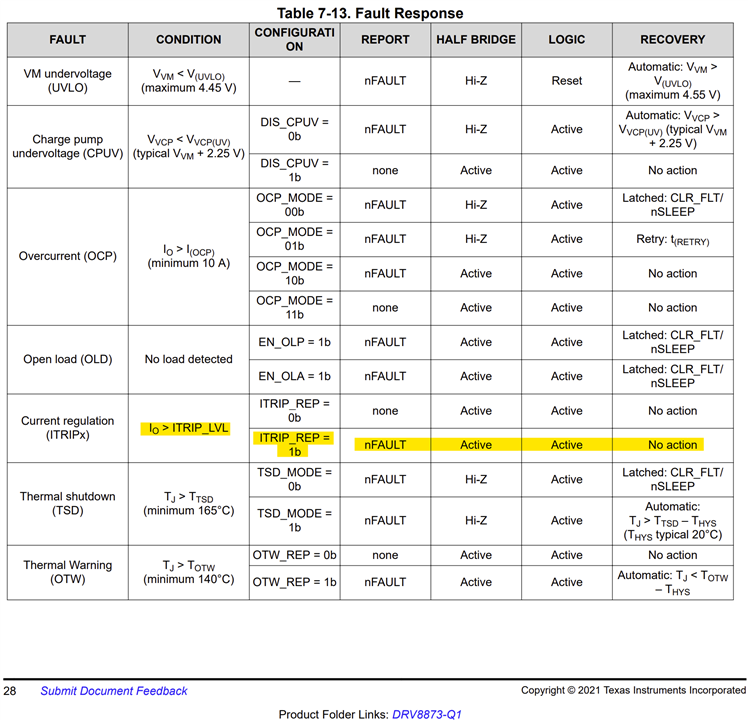
4) 4)电机的正常电流为4A 至5A、如果电机电流超过(转子锁定) 6.5A、nFAULT 引脚将变为低电平
启用 iTRIP 的情况下。
此致
M. 斯里尼瓦桑
msvasan@iepl.in