请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV10970EVM 大家好、
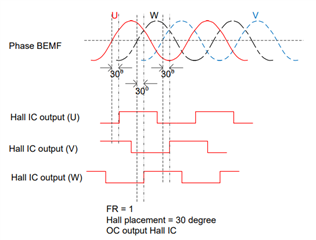
我正在使用 DRV140970EVM 驱动 BLDC 电机。 当 FR=1时、电机转速最大为6800rpm。 当 FR=0时、电机 最大转速为6000rpm。 这是什么原因呢?
大家好、
我正在使用 DRV140970EVM 驱动 BLDC 电机。 当 FR=1时、电机转速最大为6800rpm。 当 FR=0时、电机 最大转速为6000rpm。 这是什么原因呢?