请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8701 主题中讨论的其他器件: DRV8245-Q1、 DRV8462、 DRV8234、 DRV8962、 DRV8214、DRV8262
我正在尝试使用 ST V8701和外部 FET 来替换 DRVNH5019。 电路原理图。 在给定这些50mA 时、我怀疑应该在25/FET 上运行 iDrive。 当运行在15kHz 时、VNH5019对我们的电机有很好的响应。 我们具有低至35%占空比的良好低端控制。 在该配置(15kHz)下运行 DRV8701时、如果占空比为50%、电机几乎不会移动。 如果我以1KHz 运行 DRV8701、那么我可以很好地控制 DRV8701低至20%的占空比、但会出现1kHz 的可闻噪声。 在2KHz 和5kHz 占空比时、对低占空比电机的控制会停止。
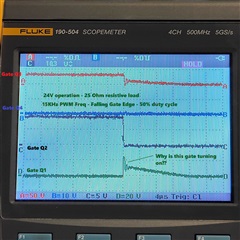
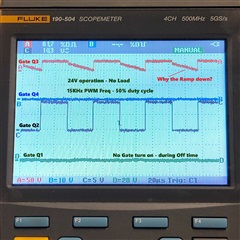
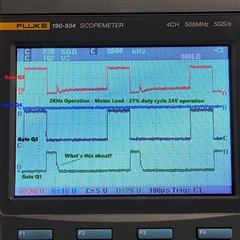
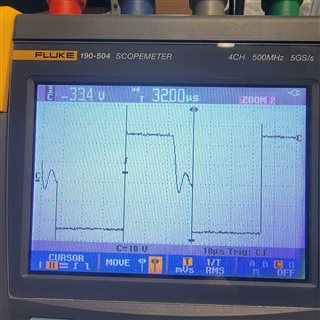
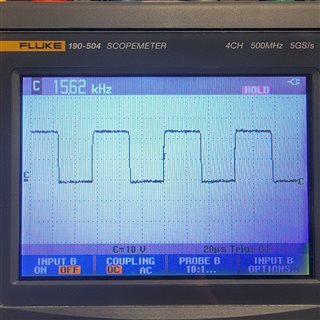
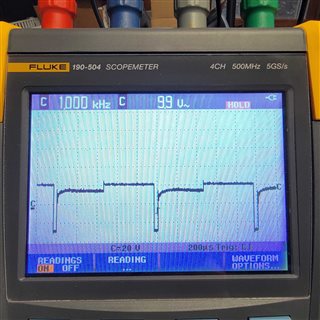
鉴于该电路和与 VNH5019相同的电机、为什么 PWM 频率 在从20%到75%的较低占空比下影响电机控制? 我还提供了一些不同频率的示波器屏幕截图。
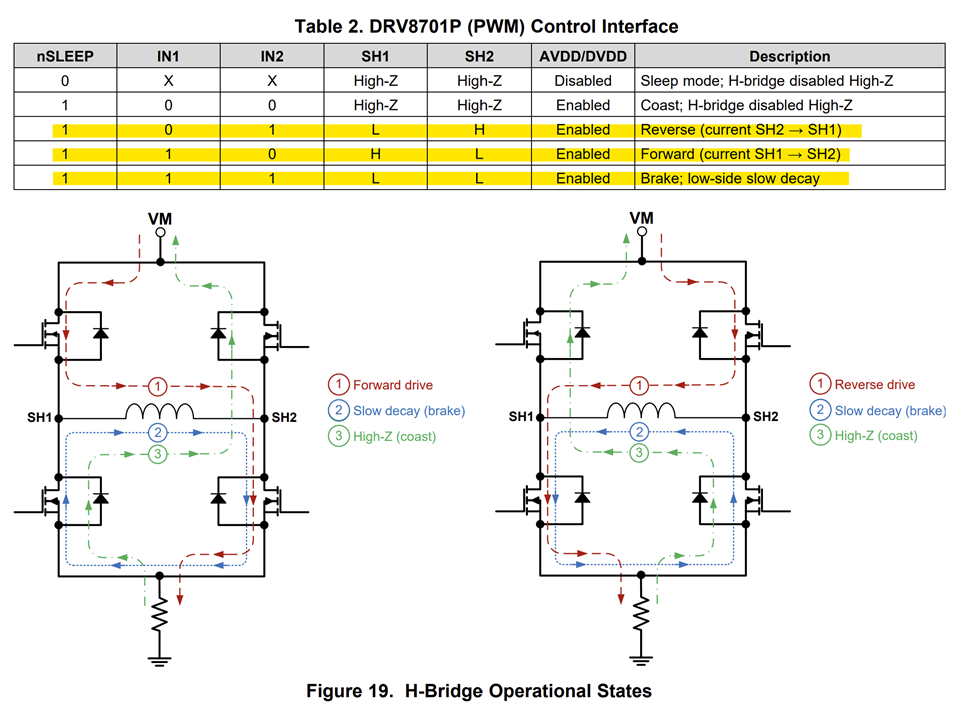
一些人建议将零欧姆电阻器 R1、R2、R3、R5更改为其他值。 但这不是 iDrive 的重点吗? 压摆率控制。
此外、 在两个有源 FET (一个高侧和一个低侧)关断周期开始时、另一个高侧 FET 会导通一段时间。 这在较低的 PWM 频率下更加明显、看起来更像一个右三角形、