请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV2605L-Q1 主题中讨论的其他器件: DRV2605L
您好!
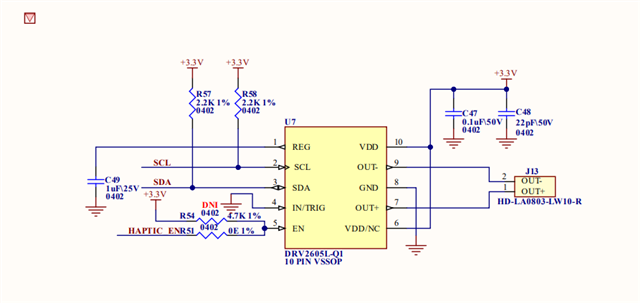
我一直在使用 DRV2605l-Q1生成触觉反馈、但无法获得反馈。 我已经附上了根据器件数据表中提供的说明编写的代码。
请检查一次、让我知道需要执行哪些操作才能获得触觉反馈。 等待您的快速支持、现在该项目正处于关键阶段、请优先考虑它。
谢谢。
总结。
#define DRV2605L_Q1_DEVICE_ADDR 0x5A
/*uint8_t MODE_reg[2];
struct RegAdd_Data {
uint8_t Reg_Add;
uint8_t Data;
};*/
//struct RegAdd_Data InitBuf[]{
uint8_t Mode[2] = {0x01,0x01}; /*Mode selection and Standby clear*/
uint8_t Lib_Select[2] = {0x03,0x02}; /*Selecting library TS2200 Library B*/
uint8_t Feedback_Ctrl[2] = {0x1A,0xA8}; /*Feedback Control*/
uint8_t R_Volt[2] = {0x16,0x8E}; /*Rated voltage for closed loop ERM*/
uint8_t OD_Clamp[2] = {0x17,0x8C}; /*OD_Clamp for closed loop ERM*/
uint8_t Auto_calib_Time[2] = {0x1E,0x30}; /*Auto calibration time*/
uint8_t Drive_time[2] = {0x1B,0x1F}; /*Drive time*/
uint8_t SamBlanIDISS_Time[2] = {0x1C,0x35}; /*Sample, Blanking and IDISS time*/
uint8_t GO_Bit[2] = {0x0C,0x01}; /*GO Bit*/
uint8_t InitDataLength = 2;
uint8_t Mode_PWM[2] = {0x01,0x03}; /*Mode selection and Standby set*/
uint8_t Analog_Input[2] = {0x1D,0x02}; /*Control register 3*/
uint8_t Mode_RTP[2] = {0x01,0x05}; /*Mode selection and Standby set*/
uint8_t Data_Format_RTP[2] = {0x1D,0x01}; /*selecting data format as unsigned*/
uint8_t Input_RTP[2] = {0x02,0x3F}; /*Providing RTP input*/
void DRV2605L_Q1_Init(void)
{
//crDELAY( xHandle, 250 );
PORT_PinSet(PORT_PIN_PB23);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Mode, InitDataLength);
AutoCalibration();
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Lib_Select, InitDataLength);
PORT_PinClear(PORT_PIN_PB23);
}
void AutoCalibration(void)
{
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Feedback_Ctrl, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, R_Volt, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, OD_Clamp, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Auto_calib_Time, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Drive_time, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, SamBlanIDISS_Time, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, GO_Bit, InitDataLength);
}
void Play_PWM(void)
{
//DRV2605L_Q1_Init();
PORT_PinSet(PORT_PIN_PB23);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Mode_PWM, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Analog_Input, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, R_Volt, InitDataLength);
PORT_PinClear(PORT_PIN_PB23);
}
void Play_RTP(void)
{
DRV2605L_Q1_Init();
PORT_PinSet(PORT_PIN_PB23);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Mode_RTP, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Data_Format_RTP, InitDataLength);
SERCOM2_I2C_Write(DRV2605L_Q1_DEVICE_ADDR, Input_RTP, InitDataLength);
PORT_PinClear(PORT_PIN_PB23);
}
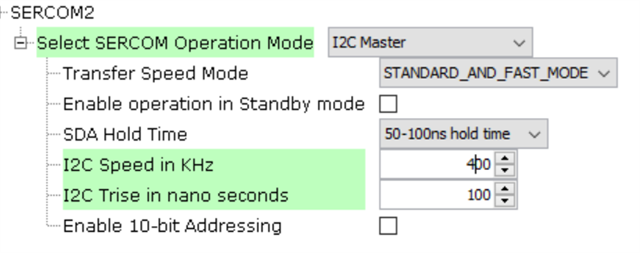
IIC function definition:
bool SERCOM2_I2C_Write(uint16_t address, uint8_t* wrData, uint32_t wrLength)
{
return SERCOM2_I2C_XferSetup(address, wrData, wrLength, NULL, 0, false, false);
}