请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
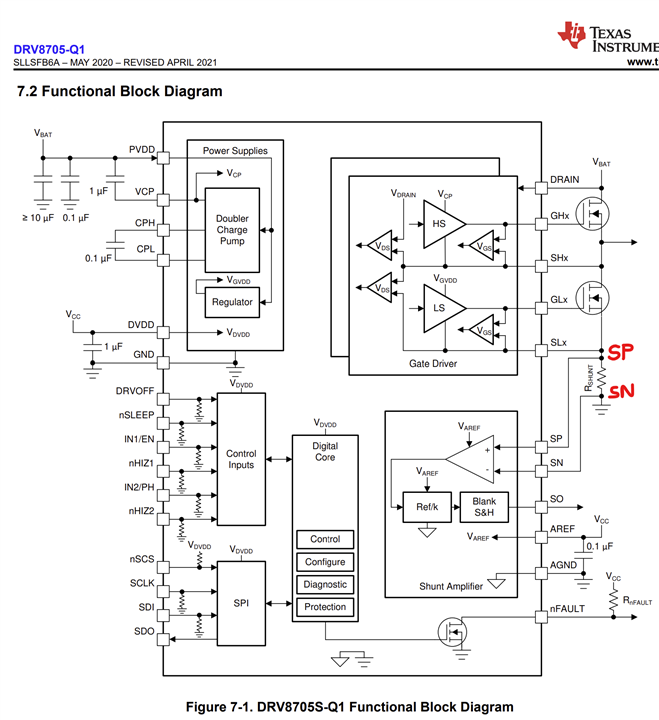
器件型号:DRV8705-Q1 主题中讨论的其他器件:CSD18512Q5B、DRV8705S-Q1EVM 、
您好!
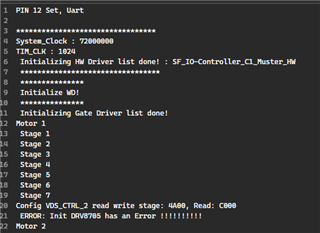
我们在应用中使用了 DRV8705SQRHBRQ1电机驱动器。 最初、我们采用了 H 桥 PWM 控制、并且根据我们的电流要求正确触发了过流故障。 随后、我们切换到了 PWM 模式的半桥控制、在进行此修改后、未观察到过流故障。 但是、调整 VDS 过流阈值后、现在可以正确触发过流故障
我们想知道更改驱动器 PWM 模式是否会影响最大电流消耗、或者是否可能是最大电流变化的其他原因。