请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8243-Q1 主题中讨论的其他器件: DRV8243H-Q1EVM
尊敬的专家:
我是 Anjali、这是我的第一个硬件。
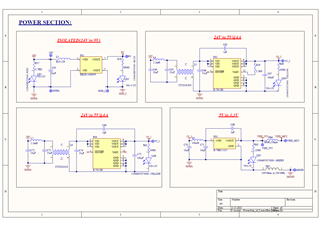
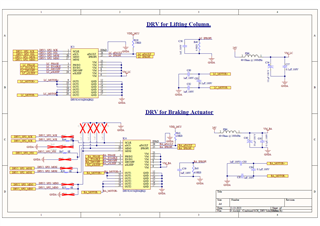
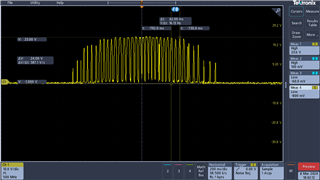
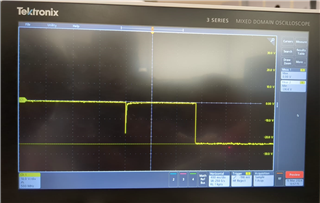
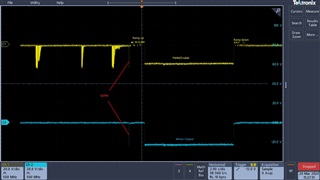
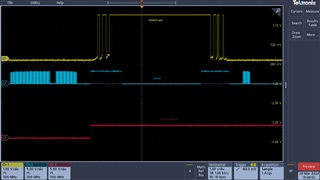
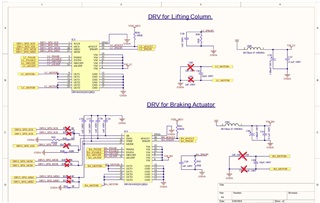
我们使用 SPI 版本的驱动器 IC 来驱动升降柱的有刷直流电机。 双向负载所需的最大电流为2.2A。 使用不同的有刷直流电机(消耗的峰值电流为1.5A)进行测试时、输出没有问题。 但是、使用提升柱进行测试时、驾驶员 IC 损坏。 H 桥短路会导致 VM-GND-OUT1-OUT2之间短路。 由于驱动器的额定值远大于2.2A、所以我无法推断出导致短路的原因。
请分享您对此的看法。 谢谢!