请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8825 主题中讨论的其他器件: DRV8411
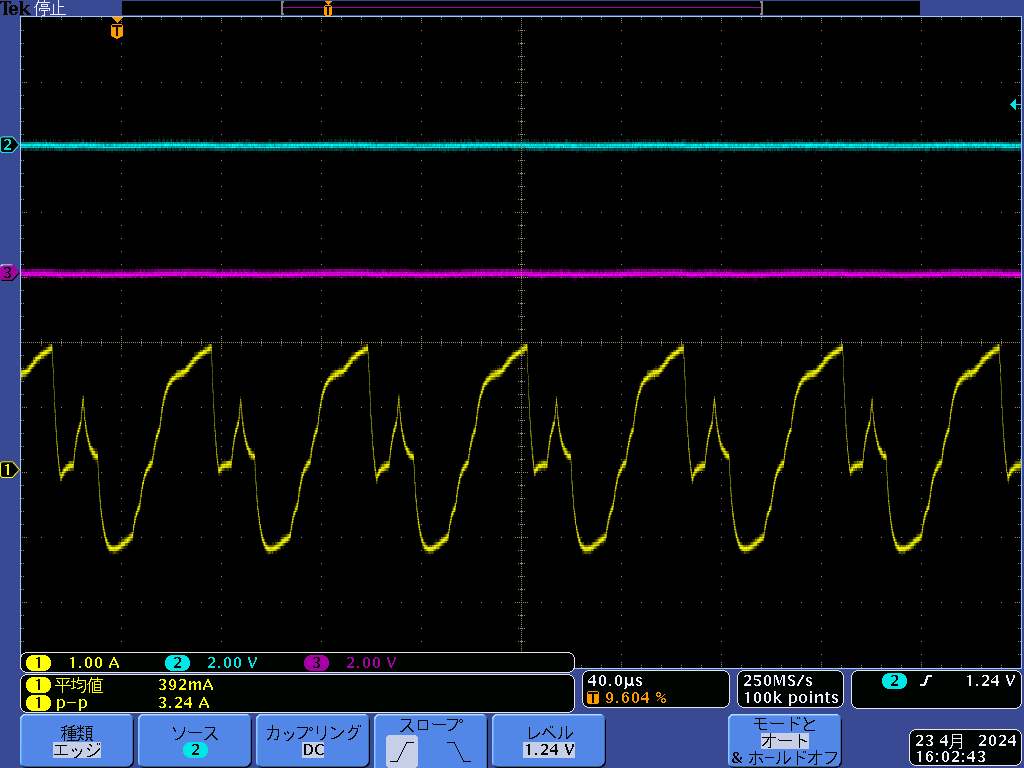
下图显示了电机停止时的 VM 电流波形。
(测量条件:VM=24V、电机电流:1.7A)
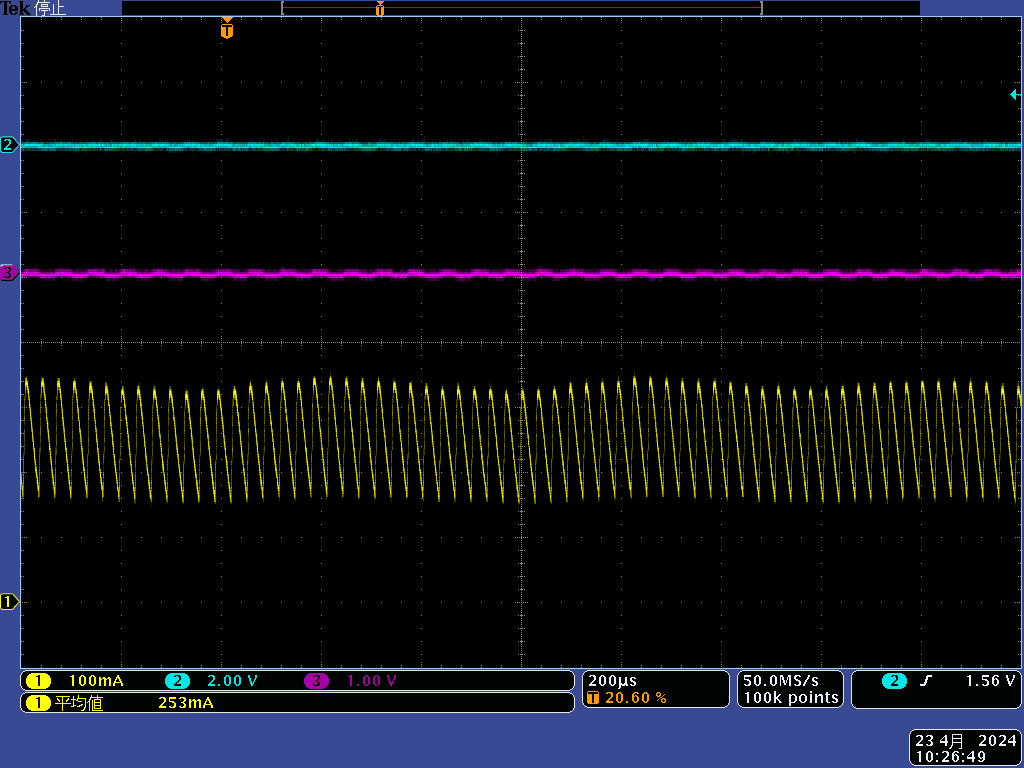
DRV8825显示在左侧、另一家公司的产品显示在右侧。
在其它公司的产品中(如右图所示)、电流消耗始终为正、斩波操作导致的纹波叠加、这是很好理解的。
另一方面、在包括 DRV8825在内的许多 TI 驱动器 IC 中、电流波形的幅度非常大、可以为负、如左图所示。 这是可以理解的、当电机旋转时、由于反电动势而发生再生、但可以肯定的是、当电机停止时、电流会变为负值。
这是否正常? 如果操作正常、请说明原因。