请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316A 您好!
我构建了一个分线板、它与评估板非常相似、可以通过 I2C 与控制器进行通信。 我设置了建议的默认值、我可以读回它们。
当我尝试启动 MPET 算法时、我总是会收到 MPET_FAULT 错误。 在论坛上搜索很长时间、尝试了很多建议、但是无法启动电机。 遗憾的是、它没有数据表、因此我只能测量 Rph 和 LPH 值、我还测量了 Ke 反电动势常数、因此我可以跳过 MPET 算法。 不过、在设置测量值后、电机不会旋转、它只会尝试一次又一次地启动。 我还尝试设置 Kp=10和 Ki=1、但仍然没有成功。
我正在使用从软盘驱动器上挽救的 BLDC 电机、它有3个引脚、4个极对。
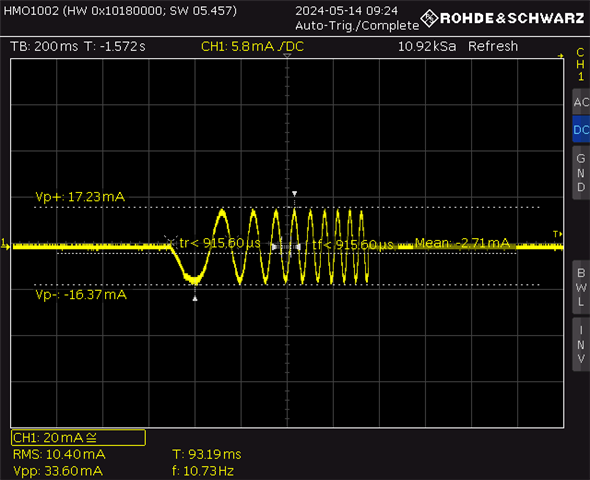
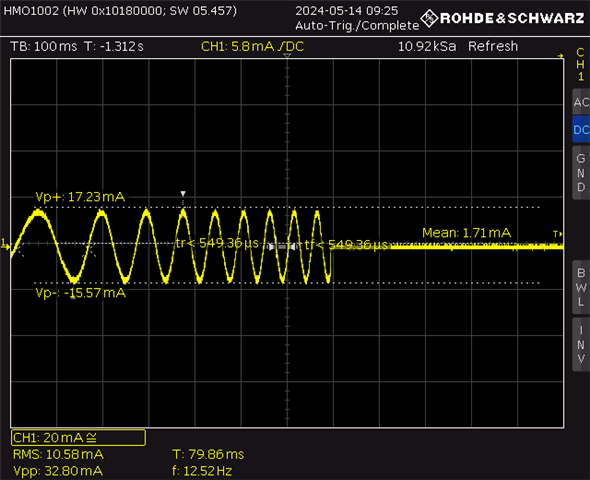
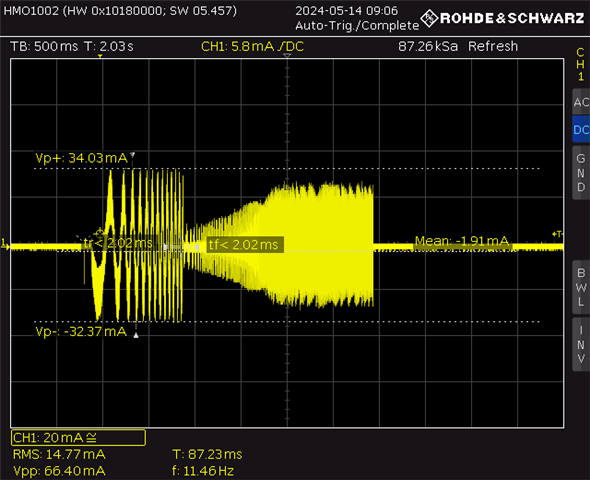
我在其中一个相位上测量了电压、信号如下所示:

您能为我提供有关如何使电机旋转的指导吗?
此致、
蒂博尔