请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8832-Q1 主题中讨论的其他器件: DRV8210、 DRV8212、 DRV8210P、DRV8212P、DRV8801A-Q1 、 DRV8876-Q1、 DRV8262
工具与软件:
专家、您好!
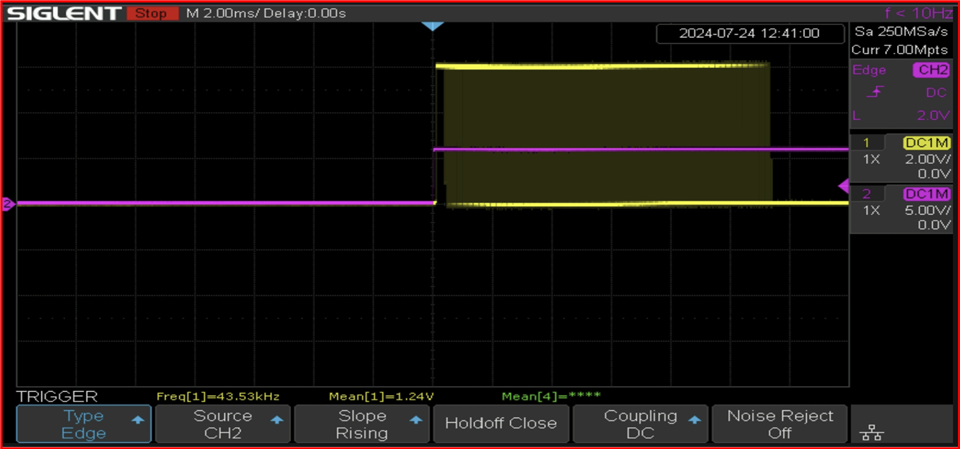
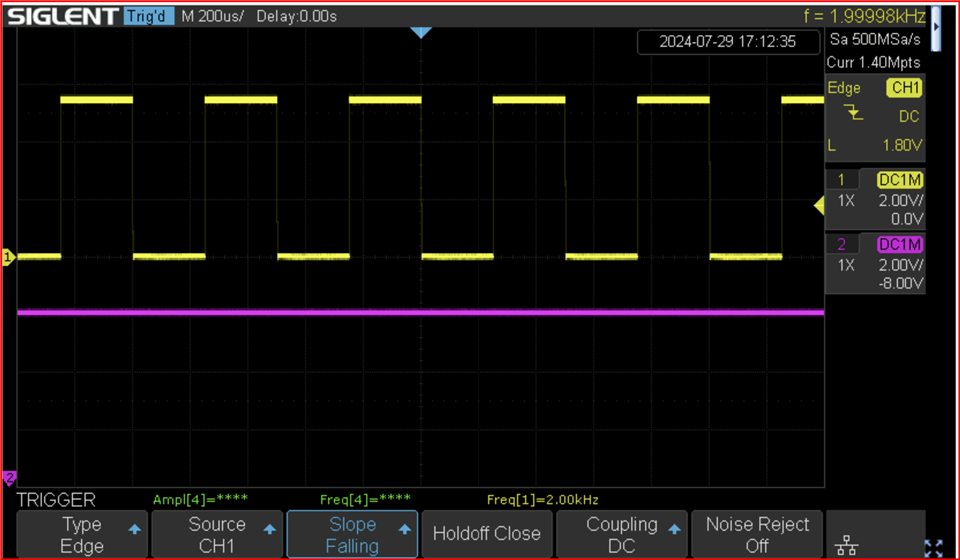
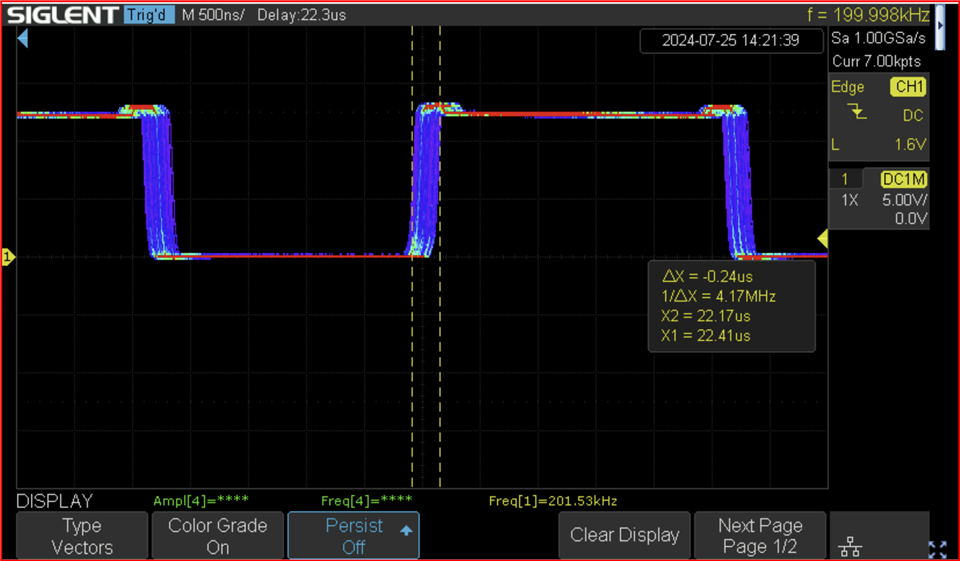
您能告诉我最大输入频率吗?
我们计划使用20Hz 至20kHz 的信号。
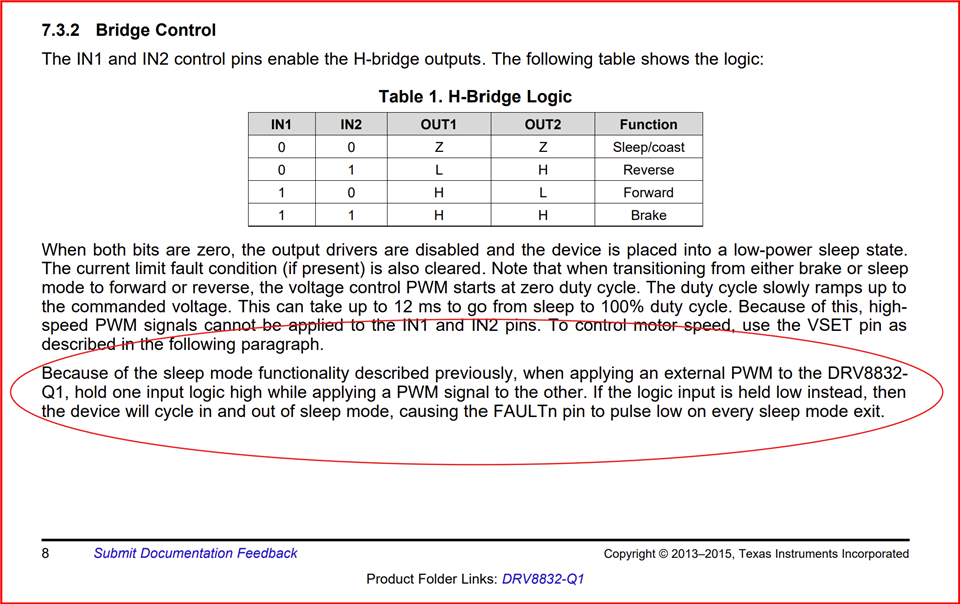
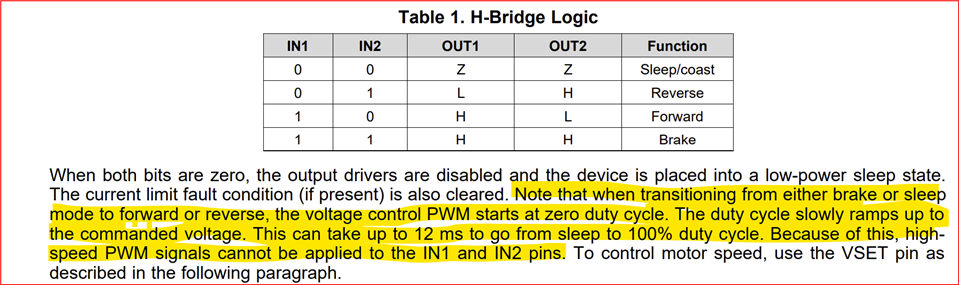
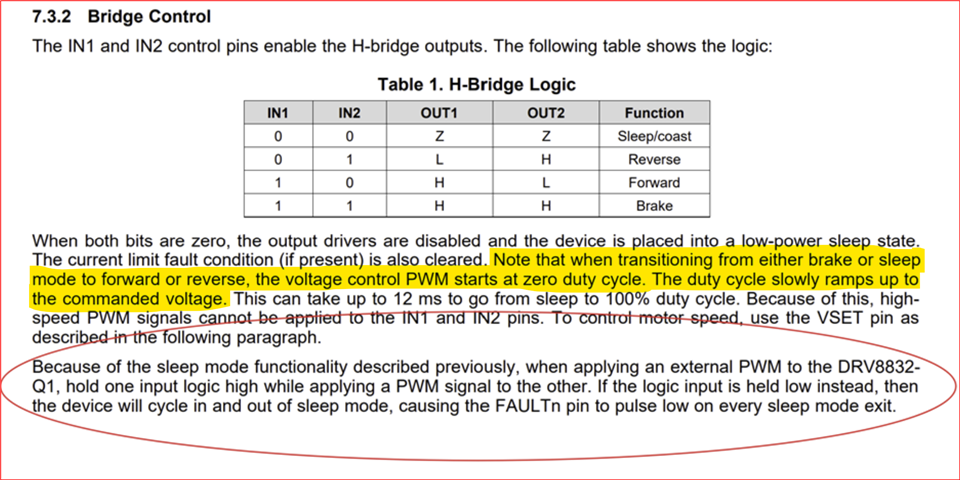
但电压调节内部 PWM 频率为44.5kHz
我想输入信号频率受到限制、这取决于电压调节设置。
此致、
Kuramochi 一树