请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8825 你好的支持团队。
我的客户遇到电机旋转问题。
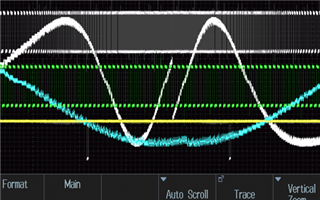
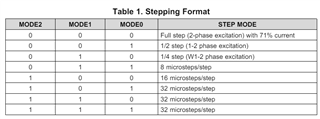
当电机以恒定速率旋转时、电流阶跃突然变化。 因此、初始位置将发生变化。
即使我使用光学传感器测量电机的旋转位置、它也是关闭的。
电机未失步。
偶尔会出现错位情况。
我们还在4台设备上确认了类似症状。
我以前从未见过这种症状、您能帮我解决吗?
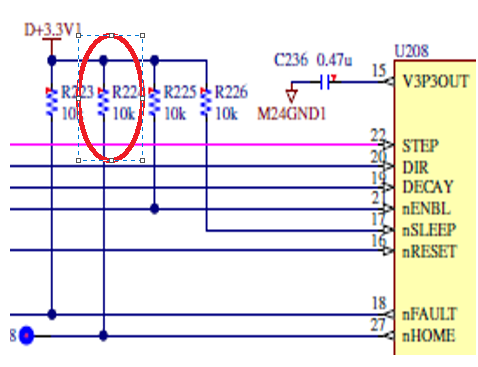
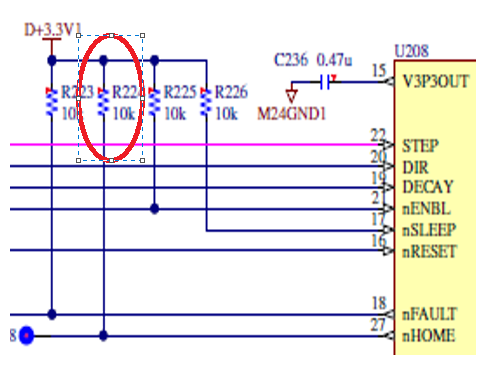
在以下材料中总结了电路图和波形数据。
如果您能给我们一些建议、我们将不胜感激。
e2e.ti.com/.../2860.Misalignment-DRV8825.xlsx
此致、
Higa