请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
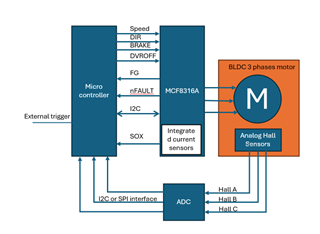
器件型号:MCF8316A 主题中讨论的其他器件: MCT8316Z、
工具与软件:
专家、您好
我正在为我的电机控制项目研究 MCF8316A。 电机的最大扭矩为11mNm、最大加速度为204,000 rad/s^2。 使用 MCF8316A 时、我能否控制电机在1.8ms 内旋转17度、然后通过高侧制动来制动电机、电机能否在19度角度之前停止? . 对齐制动功能是否适合我的需求?
注:J_TOTAL = 1.99*10^(-8)
感谢专家。 祝你度过美好的一天!