请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8213 工具与软件:
各位同事、您好!
我将使用来实现控制机制、以在两个方向上移动来机制、每个方向上花费的时间相等。
为了实现这一点、我将使用三角波来驱动该机制。 从 PWM 输入的角度来看、我会对 IN1应用上升的 PWM@32MHz 占空比、持续一半的周期、然后在另一半周期应用下降占空比。 然后、我对 IN2重复该过程。

在此处、您可以看到从逻辑分析仪捕获的两个输入。
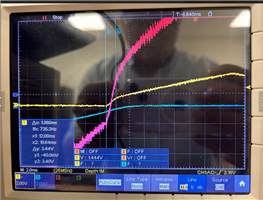
机械装置几乎按预期移动。 但是、当我检查滤波输出时会出现问题(使用低通滤波器来消除 PWM)。
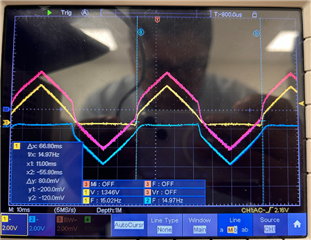
OUT1黄色、OUT2蓝色。 OUT1-OUT2粉色
如您所见、当我将运动从正向更改为反向时、存在一些非线性。 这些非线性会导致机制的运动出现干扰。 我最初以为这是由于插入了死区时间以防止击穿、但持续时间似乎过长、约为1.36ms。
有人对如何避免这种情况有任何想法吗?