请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8353 工具与软件:
您好!
我们比较了使用 FOC 的单 PWM 模式和3 PWM 模式。 具有 FOC 的3-PWM 模式与 Evalkit DRV8353H-EVM (硬件配置、而不是 SPI)一起使用。
通过此设置驱动 BLDC 泵。 采用带 FOC 的3 PWM 模式时、泵在48V 电压下每相需要大约5.5A 的峰值电流才能满载运行。 当我们使用单 PWM 模式、将霍尔传感器输出直接反馈至 DRV 输入时、我们在48V 时得到的峰值电流约为10A。
该模式显著降低了我们的设置效率。 这两种情况下的负载保持相同。
对此有何解释? 我们已经知道、在 FOC 换向设计上运行的正弦波始终会更高效、但它不能解释这两种设置之间会增加2倍。
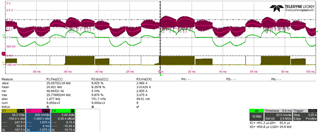
我们还注意到 SOx 输出受到噪声的高度干扰。 该噪声对应于 PWM 频率。 SPx/SNx 上的测量输入未显示此噪声。 它是 IC 的产品。 如何有效地应对这种情况?
此致、