请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8329EVM 主题中讨论的其他器件:MCT8316A、MCT8329A
工具与软件:
您好!
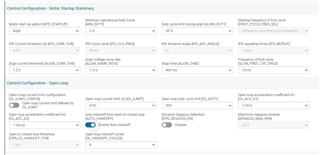
为什么在 MCT8329 GUI 中、电流限制窗口允许仅设置最大8A、该限制为16A、但程序本身会将 ME 16A 更改为8A。
如何正确计算 CBC_ILIMIT 寄存器值?
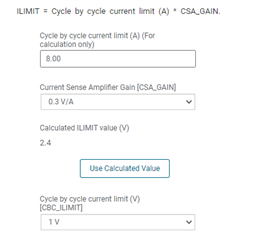
使用以下公式: =(CBC_ILIMIT -偏移)/(CSA_GAIN * RSENSE)
当偏移=0V 时、对于1.2V CBC_ILIMIT 当 RSENSE 为0.001 Ω 时、I 得到1.2/(0.15*0.001)= 8000A、该计算是否正确? 在这个公式中 RSENSE 应该以欧姆或毫欧为单位?
此致、
Adam