Other Parts Discussed in Thread: DRV8825
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:DRV8825工具与软件:
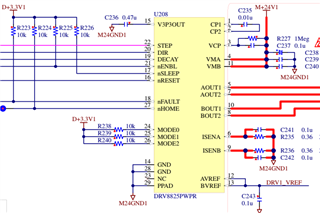
我们使用 PDRV8825WPR 步进电机控制驱动器。 我发现一个旧线程、它看起来完全相同。
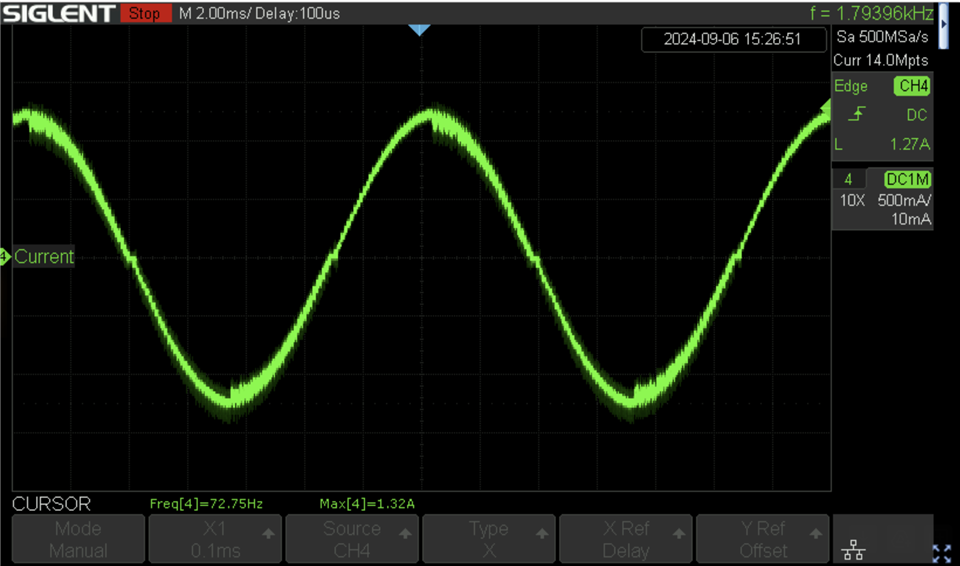
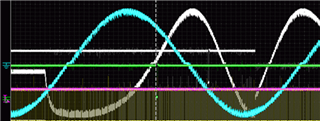
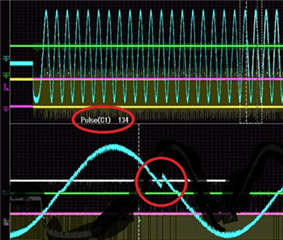
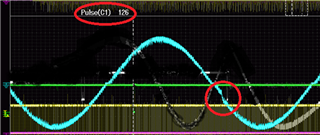
我们有两批、旧的一批已完成、但新的一批有问题。 几乎一半 有"失步问题"。 我们检查所有信号并调整"衰减模式"。 症状只发生了新的一批。 我们始终从授权经销商处购买。
李慧奇先生,请告诉我什么是抢劫问题,如何解决,如果你看我的线程.
此致
Ted Suzuki