请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-MSPM0G3507 主题中讨论的其他器件:BOOSTXL-DRV8323RS、 CSD88584Q5DC
工具与软件:
您好!
我运行的是来自 SDK 2.1.0.03的 MSPM0无传感器 FOC。 电机启动效果非常好、直到 BOOSTXL-DRV8323RS MOSFET 之一(C1或 C2或 C3)出现热事件的迹象。 现在、两块板子发生了这种情况、我感到有点困惑、因为这项行动完全在我所知的范围内。
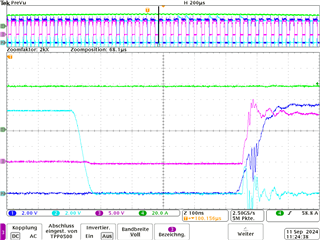
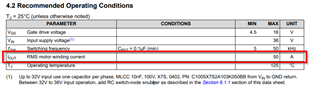
当电机稳定运行时、该系统为30V 和大约5A 供电、这是我根据它的声音进行判断的最根本原因。 该值应完全处于限制范围内、因为它小于48V 且小于15A。但是、几秒钟后、会发生过热事件、并且其中一个 MOSFET 开始吸烟。 电机停止旋转、并显示以下状态信息:
systemFaultStatus:0 (no_faults)
MotorState:6 (MOTOR_ALIGN)
我根据准备开环调试中的调优指南设置了我的系统、因此进行了以下调整:
pUserInputRegs->mtrStartUp1.b.mtrStartUpOption = 0; // Motor start-up method Align pUserInputRegs->mtrStartUp1.b.olILimitCfg = 0; // Open loop current limit defined by OL_ILIMIT pUserInputRegs->mtrStartUp2.b.olILimit = 0x05; // Open loop current limit at 10 % * FULL_SCALE_CURRENT_BASE pUserInputRegs->faultCfg2.b.maxVmMtr = 0x3; // Voltage maximum at 75 % * voltageBase pUserInputRegs->faultCfg2.b.minVmMtr = 0x0; // No voltage minimum pUserInputRegs->isdCfg.b.isdEn = 0; // Start with standstill pUserInputRegs->systemParams.mtrResist = 39; // 38.5 mOhm pUserInputRegs->systemParams.mtrInductance = 17; // 16.95 µH pUserInputRegs->systemParams.mtrBemfConst = 167; // 16.717 mV/Hz pUserInputRegs->systemParams.currLoopKp = 0; // Auto compute pUserInputRegs->systemParams.currLoopKi = 0; // Auto compute pUserInputRegs->systemParams.mtrSaliency = 0.0548; pUserInputRegs->systemParams.voltageBase = 57.42; // 57.42 V pUserCtrlRegs->algoDebugCtrl1.b.closeLoopDis = 1; // run in open loop only for Motor Open Loop Debug pUserCtrlRegs->algoDebugCtrl2.b.currLoopDis = 1; // disapble current loop only for Motor Open Loop Debug pUserCtrlRegs->algoDebugCtrl2.b.forceVDCurrLoopDis = 100; // starting point for tuning pUserCtrlRegs->algoDebugCtrl2.b.forceVQCurrLoopDis = 100; // starting point for tuning pUserCtrlRegs->speedCtrl.b.speedInput = 500; #define FULL_SCALE_CURRENT_BASE 23.571 #define MOTOR_MAX_SPEED 833.0
我希望防止丢失更多硬件。 有什么我丢失的东西吗?