请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316A 工具与软件:
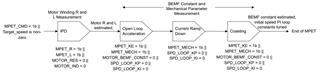
早上好、我目前正在与 MCF8316A 驱动器一起控制 DF45M024053-A2 BLDC 电机。 在了解如何设置所需的电机参数以实现"干净"启动时、我目前遇到问题。 我已启用 MPET 测量以及写入操作、通过写入 EEPROM 存储器来更新参数。 电机停止旋转后、我将信息存储到微处理器的闪存中、我使用该闪存向驱动器发送命令。 完成该操作后、我将 MPET 测量一次性全部关闭。 这样、我可以直接从闪存中加载当前保存的配置、而无需等待电机估算其所有参数。 现在的问题是、一旦我打开电机、执行我发送的命令需要很长时间(例如、我将速度设置为2000、但在实际达到此速度之前需要大约20秒)。 首次启动后、电机还会根据我设置的配置数据对我发送的命令做出有效反应。 尽管如此、我仍无法理解其行为为何如此、我当时认为可能存在的问题是电机最初执行开环、而这是我所看到的、当电机未对发送的命令做出相应反应时。 这里是我所使用的配置、在本例中、MPET 被禁用。
地址: 值:
{0x0080、0x44638C20}、// ISD_CONFIG
{0x0082、0x283AF064}、// REV_DRIVE_CONFIG
{0x0084、0x0E6807D0}、// MOTOR_STARTUP1
{0x0086、0x23AE6000}、// MOTOR_STARTUP2
{0x0088、0x28A181B0}、// Close_LOOP1
{0x008A、0x1AAD0000}、// Close_LOOP2
{0x008C、0x00000000}、// Close_LOOP3
{0x008E、0x00000F2C}、// Close_LOOP4
{0x0094、0x00000000}、// SPEED_PROFILES1
{0x0096、0x00000000}、// SPEED_PROFILES2
{0x0098、0x00000000}、// SPEED_PROFILES3
{0x009A、0x00000000}、// SPEED_PROFILES4
{0x009C、0x00000000}、// SPEED_PROFILES5
{0x009E、0x00000000}、// SPEED_PROFILES6
{0x0090、0x5FE80207}、// FAULT_CONFIG1
{0x0092、0x74000000}、// FAULT_CONFIG2
{0x00A0、0x00B3407D}、// INT_ALGO_1
{0x00A2、0x000001A7}、 // INT_ALGO_2 (旧的2BD)
{0x00A4、0x00000001}、// PIN_CONFIG
{0x00A6、0x00000000}、// device_config1
{0x00A8、0x0000B000}、// DEVICE_CONFIG2
{0x00AA、0x40000000}、// peri_config1
{0x00AC、0x00000100}、// GD_CONFIG1
{0x00AE、0x00200000}、// GD_CONFIG2
{0x00EA、0x00000000}、// algo_CTRL1
{0x00EE、0x00000000}、// algo_CTRL2
我曾尝试使用不同的开环参数和 MOTOR_STARTUP 配置、但似乎没有改变这一问题。 如果你能给我任何帮助,请提前感谢!