请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8329A 工具与软件:
你(们)好、
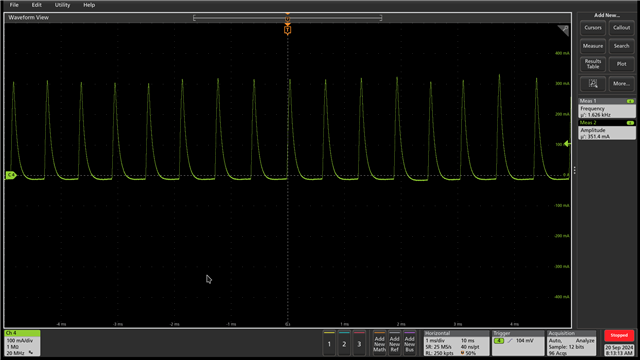
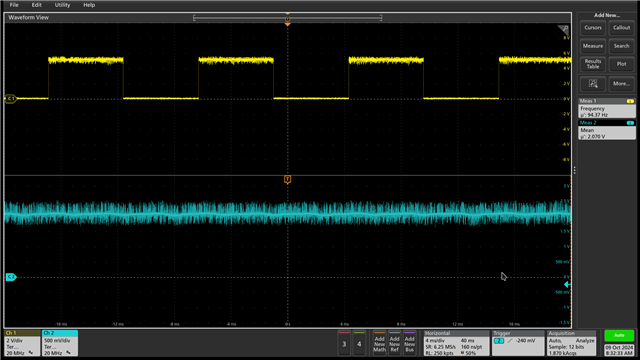
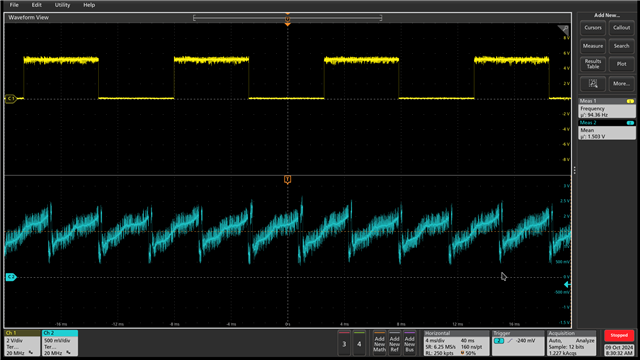
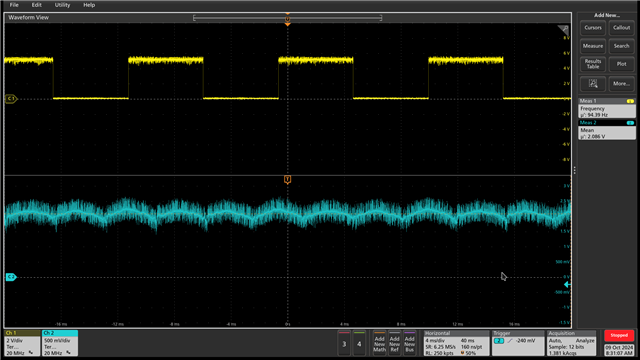
我正在使用 MCF8329A 设计电路板。 当我在电源线上使用电流探头时、我会看到频率约为1.6kHz (稍微抖动)的电流脉冲、振幅降低了300 mA、而未连接/运行任何电机。 这与我的定制电路板和我最初从 TI 购买的标准演示板相同。 我从示波器发送一个屏幕截图作为参考。
您能告诉我造成这种行为的原因是什么、以及我如何影响这些电流脉冲的频率和振幅吗?
此致、
Alexander。