

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8329A 主题中讨论的其他器件: MOTORSTUDIO
工具与软件:
您好!
我正在尝试与 mcf8329a 周围的座右铭河。 但是、我的设置中似乎有一些问题。
我已购买并使用 TI 的评估板测试了此器件的所有产品、它能很好地与我的电机配合工作。 我已经调优并导出了 json 中的所有设置。
但现在、我将在我们自己的硬件上尝试相同的代码、而且不会得到预期的结果。 电机未开始旋转。 查看相位 ABC 后、我可以看到驱动器正在做一些事、首先在所有相位上以50kHz 的正方形切换相位、但之后什么都不做、没有运动、没有报告故障或任何事情。 所以我有点卡住了。 您是否对问题可能是什么有任何想法?
我有通信功能、可以与 mcf8329a 进行通信、但我无法让电机转动。 我使用 Arduino 作为测试平台。
这些是我的寄存器设置;
Register registers[] = {
{0x00000080, 0xE2EBD667},
{0x00000082, 0xC0E89EE6},
{0x00000084, 0x50A24EC2},
{0x00000086, 0x93372007},
{0x00000088, 0x16788328},
{0x0000008A, 0x9AAD5721},
{0x0000008C, 0x1BF4182A},
{0x0000008E, 0x60980960},
{0x00000094, 0x00000000},
{0x00000096, 0x00000000},
{0x00000098, 0x80000004},
{0x0000009A, 0x00000000},
{0x0000009C, 0x00000000},
{0x0000009E, 0x00000000},
{0x00000090, 0x26483186},
{0x00000092, 0x71402888},
{0x000000A0, 0x0946027D},
{0x000000A2, 0x02008165},
{0x000000A4, 0x40032310},
{0x000000A6, 0x40100000},
{0x000000A8, 0x03E8C00C},
{0x000000AA, 0x06A045C0},
{0x000000AC, 0x80008079},
{0x000000AE, 0x80000102},
{0x000000E0, 0x00000000},
{0x000000E2, 0x00000000},
{0x000000E4, 0x24318C94},
{0x000000E6, 0x00000000},
{0x000000E8, 0x3A000000},
{0x000000EA, 0x00000000},
{0x000000EC, 0x80000000},
{0x000000EE, 0x00000018},
{0x000000F0, 0x030503A0},
{0x000000F2, 0x02600160},
{0x000000F4, 0x00000000},
{0x00000196, 0x00000000},
{0x0000019C, 0x045C1DE8},
{0x0000040E, 0x00197857},
{0x0000043C, 0x00440000},
{0x0000043E, 0x00680000},
{0x00000440, 0x00CC0000},
{0x00000450, 0x00000002},
{0x00000458, 0x00020002},
{0x0000045C, 0x01FDA000},
{0x00000460, 0x00033F62},
{0x00000462, 0x000376CF},
{0x00000464, 0x000261AE},
{0x000004AA, 0xFA88A300},
{0x000004AC, 0xF86B7264},
{0x000004CC, 0x00A80000},
{0x000004CE, 0x00A89616},
{0x000004D0, 0xFFADDE8B},
{0x000004D2, 0x008D6DC2},
{0x000004DC, 0xFFA8A1F4},
{0x000004DE, 0x0075FB02},
{0x000004E0, 0x000BB21E},
{0x000004E2, 0x008FFF8F},
{0x0000051A, 0x00000000},
{0x00000532, 0x00E9C550},
{0x00000542, 0x04CCBAB0},
{0x000005D0, 0x00000000},
{0x0000060A, 0x00000000},
{0x0000060C, 0x005F3E12},
{0x000006B0, 0x00000005},
{0x000006BA, 0x00000172},
{0x000006E4, 0x0004000B},
{0x0000071A, 0x00A737C2},
{0x0000075C, 0xFFFFFEA1},
{0x0000075E, 0x008E5BE6},
{0x0000076E, 0x00000000},
{0x00000774, 0x58830AD3}
};
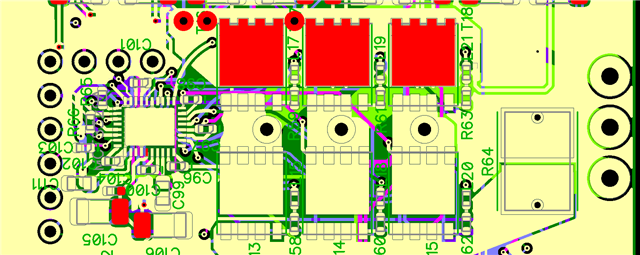
这是我的布局;
我想了解使用评估套件时如何通过 i2c 设置启动和速度命令。 哪些引脚在启动前被置位为高电平/低电平?
我已尝试清除所有故障、但没有区别。
这是我用于设置速度的代码;
// Function to set the motor speed using ALGO_DEBUG1 register
void setMotorSpeed(uint8_t address, uint16_t speed) {
// Read the current value of ALGO_DEBUG1 register (address 0xEC)
uint32_t currentValue = MCF8329AReadRegister(address, 0xEC);
// Modify the SPEED_OVER_RIDE and DIGITAL_SPEED_CTRL fields
currentValue |= 0x80000000; // Set SPEED_OVER_RIDE to 1 (bit 31)
currentValue &= ~(0x1FFFF << 16); // Clear DIGITAL_SPEED_CTRL bits (30-16)
currentValue |= ((speed & 0x1FFFF) << 16); // Set DIGITAL_SPEED_CTRL bits (30-16)
// Split the modified value into bytes
uint8_t byte4 = (currentValue >> 24) & 0xFF;
uint8_t byte3 = (currentValue >> 16) & 0xFF;
uint8_t byte2 = (currentValue >> 8) & 0xFF;
uint8_t byte1 = currentValue & 0xFF;
// Write the updated value back to ALGO_DEBUG1 register
MCF8329AWriteRegister(address, 0xEC, byte4, byte3, byte2, byte1);
}
我不确定这是否是设置电机转速的正确方法。 这是调试寄存器、这似乎很奇怪。
感谢任何帮助!
