请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 工具与软件:
您好:
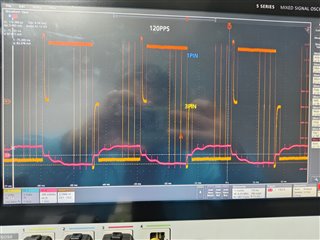
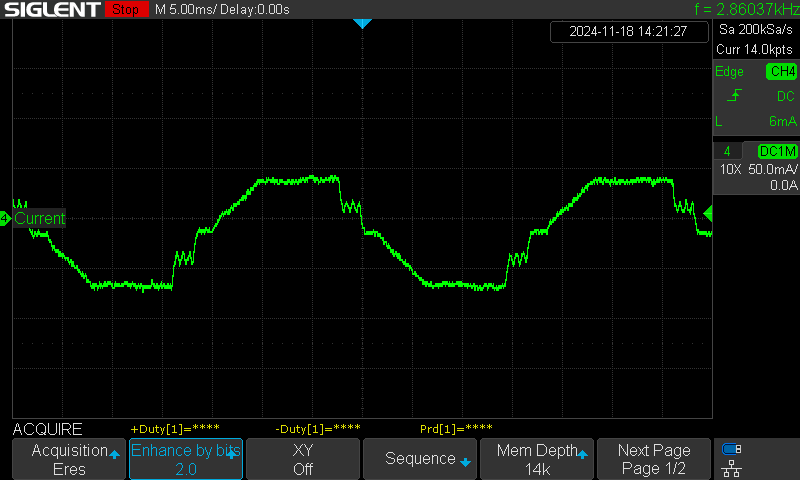
我们使用8889A 来驱动电机、配置为1/4微步进、智能调优纹波控制模式、可 在 STEP 引脚上每秒提供480个脉冲、因此电机噪声非常大。 我们还尝试了其他 PPS 和微步进参数、但电机噪声未显著降低。 电机供应商告诉我们无法减小电机驱动电流、否则无法驱动电机。 我们如何降低电机噪声并使电机驱动波形接近正弦 wave.e2e.ti.com/.../Q24BYJ48_2D00_3361w.pdf