请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8315A 工具与软件:
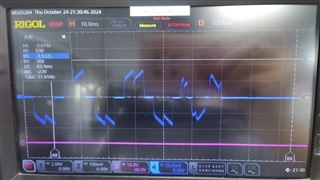
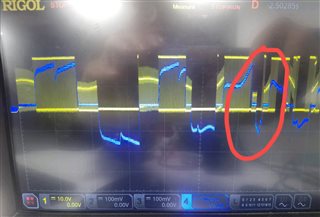
请参见图片、这是 开环到闭环转换示波器波形、目前我的电机启动失败。
我需要一些建议 、如何优化该波形、使这个电磁角度准确。
这是我的配置参数、请检查是否有任何问题。
uint32_t prop_data[PROP_DATA_MAX]={
0x2C822180、//0x80
0x58C949C9、//0x82
0x724DA83C、//0x84
0x114670C8、//0x86
0x438A0028、//0x88
0x4CC40180、//0x8A
0x000008F9、//0x8C
0x1F41F419、//0x8E
0x0AFE04C84、//0x90
0x78C24820、//0x92
0x79E80229、//0x94
0x36DB6DA6、//0x96
0x36DB6D80、//0x98
0x054BA106、//0x9A
0x12880000、//0x9C
0x00000000、//0x9E
0x00000000、//0xA0
0x00000000、//0xA2
0x00000004、//0xA4
0x000C0000、//0xA6
0x7FFF4800、//0xA8
0x00000000、//0xAA
0x1440180C、//0xAC
0x14000000};//0xAE