Other Parts Discussed in Thread: DRV8350
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8350 工具与软件:
你好
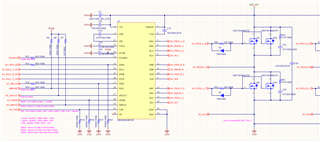
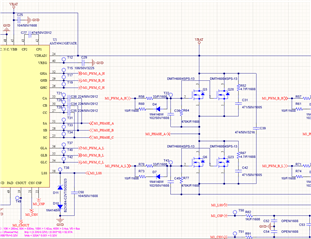
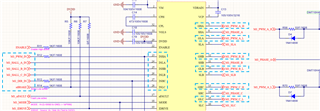
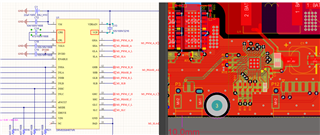
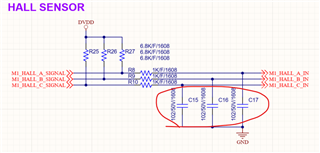
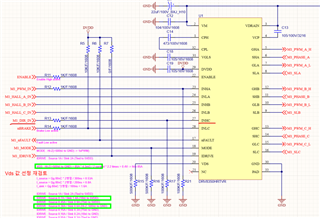
我使用 DRV8350HRTVR 设计了电机驱动器。
我在测试电机驱动器 PCB 时遇到了两个问题。
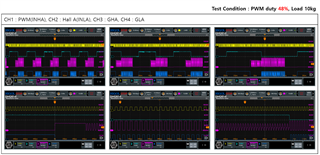
当我在电机驱动器使能引脚上施加高电平后向引脚23输入 PWM 占空比信号时、电机不会旋转。 我必须手动向电机施加旋转力、才能使电机开始旋转。 (请参阅随附的视频)
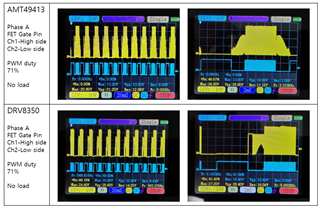
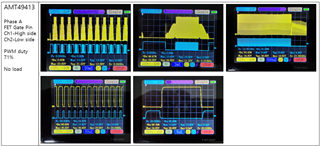
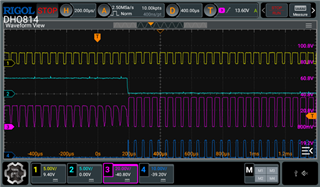
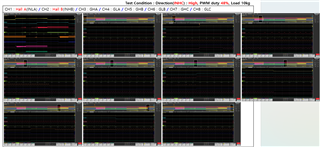
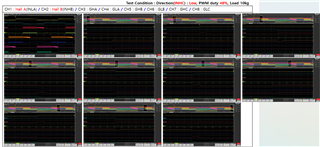
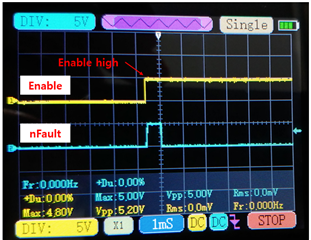
2.使用上述方法操作电机一次或两次时、DRV8350H 器件会输出故障信号。 (低电平有效)
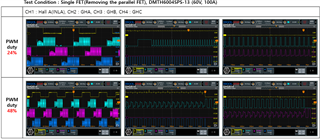
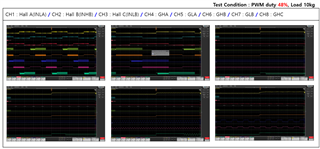
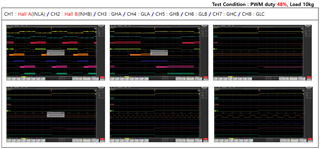
即使我反复关闭和打开电机驱动器 PCB 的电源、也会在我向 DRV8350H 器件输入使能高电平信号时输出故障信号。 我怀疑 IC 损坏了。 (请参考示波器波形)
我将 Idrive 设置为每灌电流1A(连接至5VDD)。 这是否是驱动程序 IC 故障的原因? 使用的 FET 的 Qg 为80nC、并且两个 FET 是并联配置的。