Other Parts Discussed in Thread: DRV8714-Q1, DRV8718-Q1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
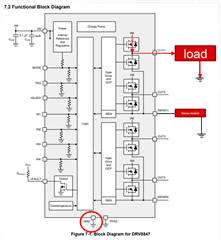
器件型号:DRV8847 主题中讨论的其他器件:DRV8718-Q1、DRV8714-Q1
工具与软件:
您好!
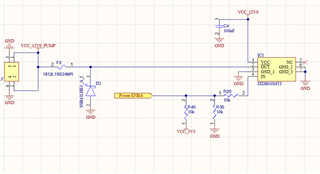
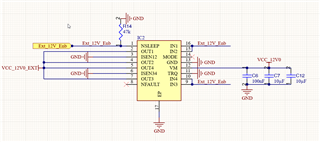
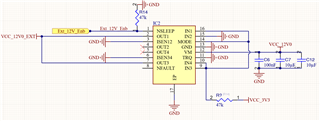
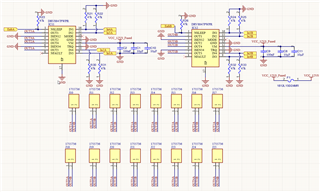
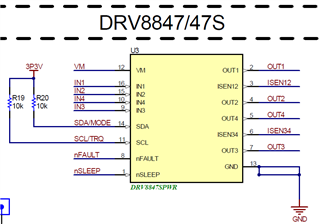
这是我的设计、如下所示。 目标是实现16个独立闭锁螺线管驱动器、但出于某种原因、它无法输出12V 的高电压。 最大输出电压为0.7V。
经过一些调查,我注意到 ISEN12. 和 ISEN34. 悬空。 由于我不想限制电流、这些引脚悬空。 但是、我认为正确的方法是将它们连接到 GND。 这将在 PCB 的下一个版本中解决、在该版本中、它们将连接到 GND。
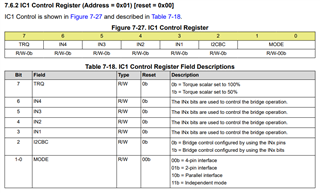
我的问题与有关 TRQ 质量。 似乎这也会影响输出电流。 应如何设置该引脚?
谢谢你。