Other Parts Discussed in Thread: DRV8363, MSPM0G3519, DRV8363-Q1EVM, LAUNCHXL-F280049C, DRV8363-Q1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: DRV8363-Q1EVM
Thread 中讨论的其他器件: MSPM0G3519、 LAUNCHXL-F280049C、 DRV8363-Q1、DRV8363
您好、
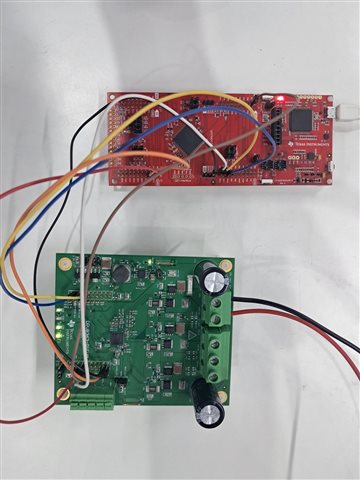
我正在使用设计 BLDC 电机控制应用 MSPM0G3519 MCU 并采购了 DRV8363-Q1EVM 用于栅极驱动器评估。
在阅读 DRV8363-Q1EVM 快速入门指南时、我注意到以下注意事项:
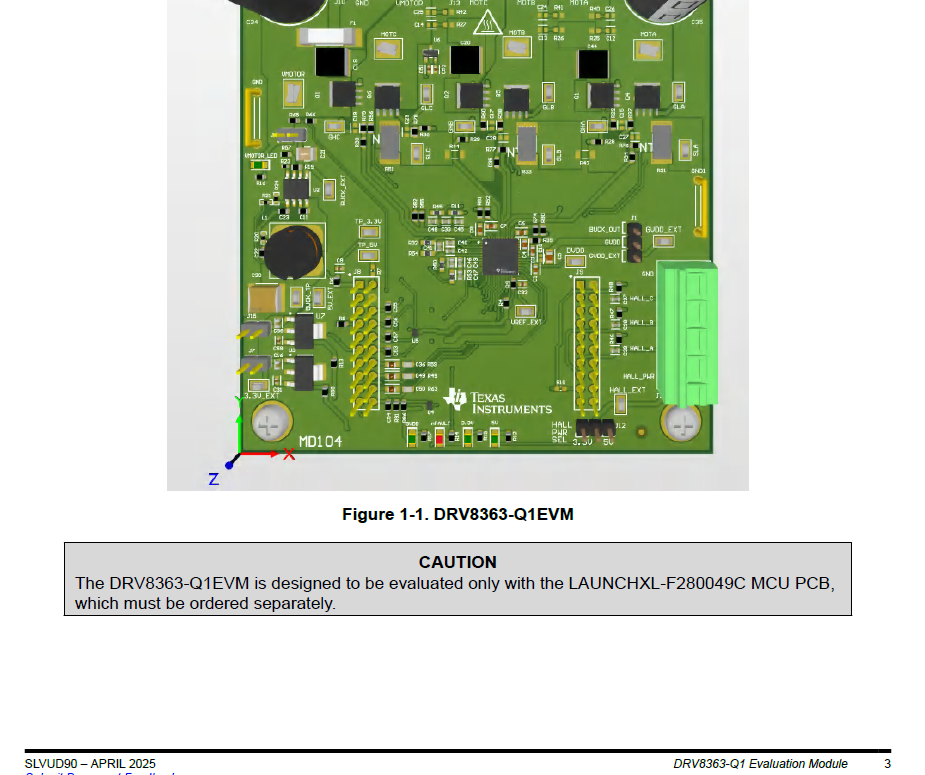
目前、我没有 LAUNCHXL-F280049C 我打算将 DRV8363-Q1EVM 直接与连接 MSPM0G3519 代替。
我希望澄清以下几点:
-
是 DRV8363-Q1EVM 在电气和功能上兼容 使用 MSPM0G3519 进行评估(SPI + 6-PWM 控制)?
-
注意事项是否表示 硬件限制 或主要与有关 官方软件支持和验证 问题?
-
有任何问题 特定约束、风险或建议的检查 将 DRV8363-Q1EVM 与非 C2000 MCU(例如 MSPM0?
-
有任何问题吗 参考文档、应用手册或推荐的验证过程 如何使用通用 MCU 启动 DRV8363-Q1EVM?
-
对于基本 BLDC 运行(6 步换向)、MSPM0 中基于软件的死区时间生成是否被视为可用于评估?
我的目标是安全验证 DRV8363-Q1 器件、并使用 MSPM0G3519 执行低功耗 BLDC 电机控制实验。
请您提供指导、说明这种方法是否可以接受以及您可能提出的任何建议。
感谢您的支持。
此致、
Sakhan